




- Produto Químico de Alta Preocupação: Nenhum
- É elétrica e não: Sem bateria
- Quantidade: 1
- Distância entre eixos: PLACA INFERIOR
- É bateria/fonte de alimentação: não
- É carregador/adaptador: não
- As baterias estão incluídas: Não
- Tamanho: 450
- Parâmetros técnicos: KV1100
- Número do modelo: PRO 6C M9N
- Para veículos de tipo: Aviões
- Suprimentos de ferramentas: Classe montada
- Atributos de tração nas quatro rodas: Montagem
- Periféricos/dispositivos de controle remoto: Controle remoto
- Peças/acessórios para melhorias: FRAME
- Peças RC e Acessórios: Sistemas de rádio
- Material: Fibra de Carbono
- Nome da marca: rctosky
- Origem: CN (Origem)
- Recomendar A Idade: 14 + y
- Use: Veículos e brinquedos de controle remoto
PIXHAWK 6C PRO
O Pixhawk® 6C PRO é a atualização mais recente para a família de sucesso da Pixhawk® controladores de vôo, baseados no Pixhawk® Padrão aberto FMUv6C e padrão de conector.Ele vem com piloto automático PX4® pré-instalado.STMicroeletrônica® baseado em STM32H743, combinado com tecnologia de sensores da Bosch® & InvenSense®, proporcionando flexibilidade e confiabilidade para controlar qualquer veículo autônomo, adequado para aplicações acadêmicas e comerciais.
O Pixhawk® O microcontrolador H7 da 6C PRO contém o braço® Cortex®-Core M7 funcionando até 480 MHz, possui 2 MB de memória flash e 1 MB de RAM.Graças ao poder de processamento atualizado, os desenvolvedores podem ser mais produtivos e eficientes em seu trabalho de desenvolvimento, permitindo algoritmos e modelos complexos.
O Pixhawk 6C PRO inclui IMUs de alto desempenho e baixo ruído a bordo, projetados para serem econômicos e com redundância de IMU.Um sistema de isolamento de vibração para filtrar vibrações de alta frequência e reduzir o ruído para garantir leituras precisas, permitindo que os veículos alcançem melhor desempenho geral de voo.
O Pixhawk® 6C PRO é perfeito para desenvolvedores de laboratórios de pesquisa corporativa, startups, acadêmicos (pesquisas, professores, alunos) e aplicações comerciais.
Pontos principais de design
Processador STM32H743 de alto desempenho com mais potência de computação e RAM
Campainha embutida, LED RGB embutido, suporte para botão de segurança externo independente, com caixa de plástico
Novo design econômico com fator de forma discreto
Sistema de isolamento de vibração integrado recentemente projetado para filtrar vibrações de alta frequência e reduzir o ruído para garantir leituras precisas
As IMUs são controladas por temperatura por resistores de aquecimento integrados, permitindo uma temperatura ideal de trabalho das IMUs
Especificação Técnica
Processadores e sensores
Processador FMU: STM32H743
Braço de 32 bits® Cortex®-M7, 480 MHz, 2 MB de memória, 1 MB de SRAMProcessador IO: STM32F103
Braço de 32 bits® Cortex®-M3, 72 MHz, 64 KB SRAM
Sensores a bordo
Acel/Gyro: ICM-42688-P
Accel/Gyro: BMI055
Mag: IST8310
Barômetro: MS5611
Dados elétricos
Classificações de tensão:
Tensão máxima de entrada: 6V
Entrada de energia USB: 4,75 ~ 5,25 V
Entrada do servo trilho: 0 ~ 36V
Classificações atuais:
Limitador de corrente de saída máxima TELEM1: 1,5A
Limitador de corrente de saída combinada de todas as outras portas: 1,5A
Dados mecânicos
Dimensões: 85*45*10mm
Peso (caixa de plástico): 33g
Pacote simples:
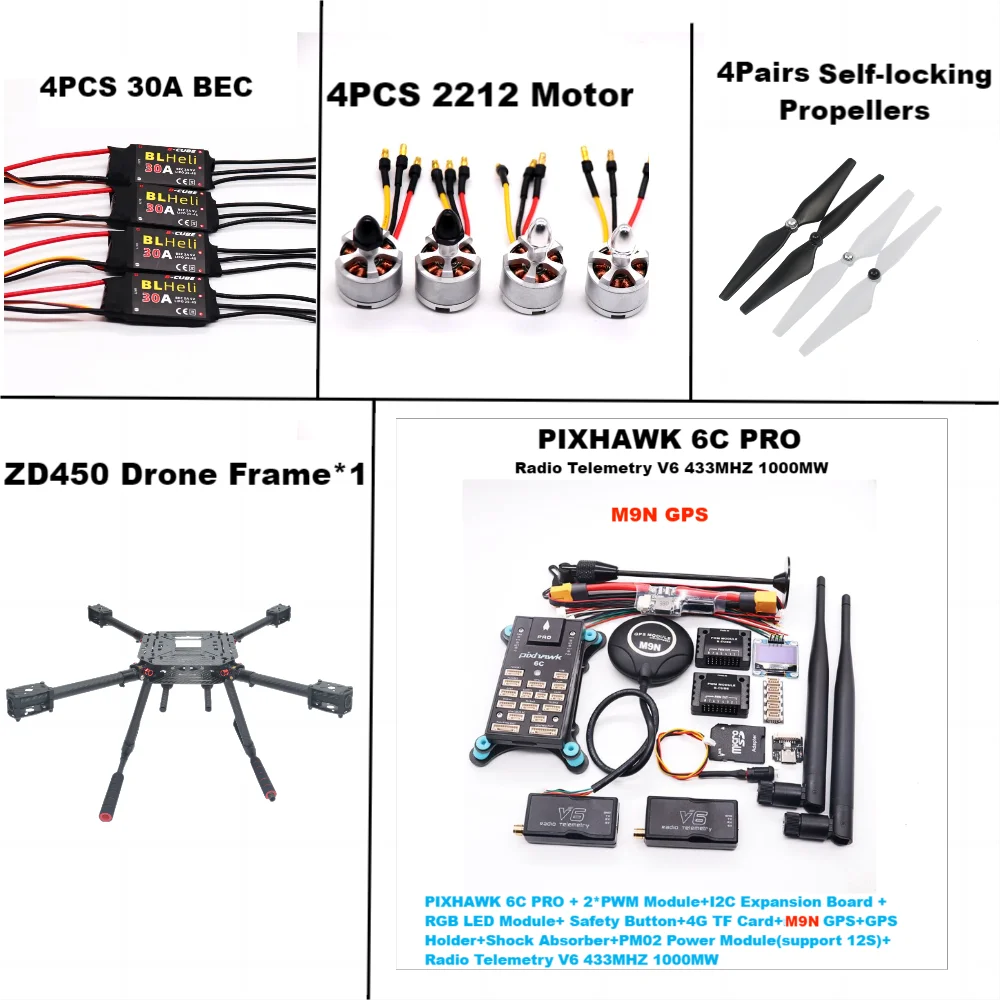
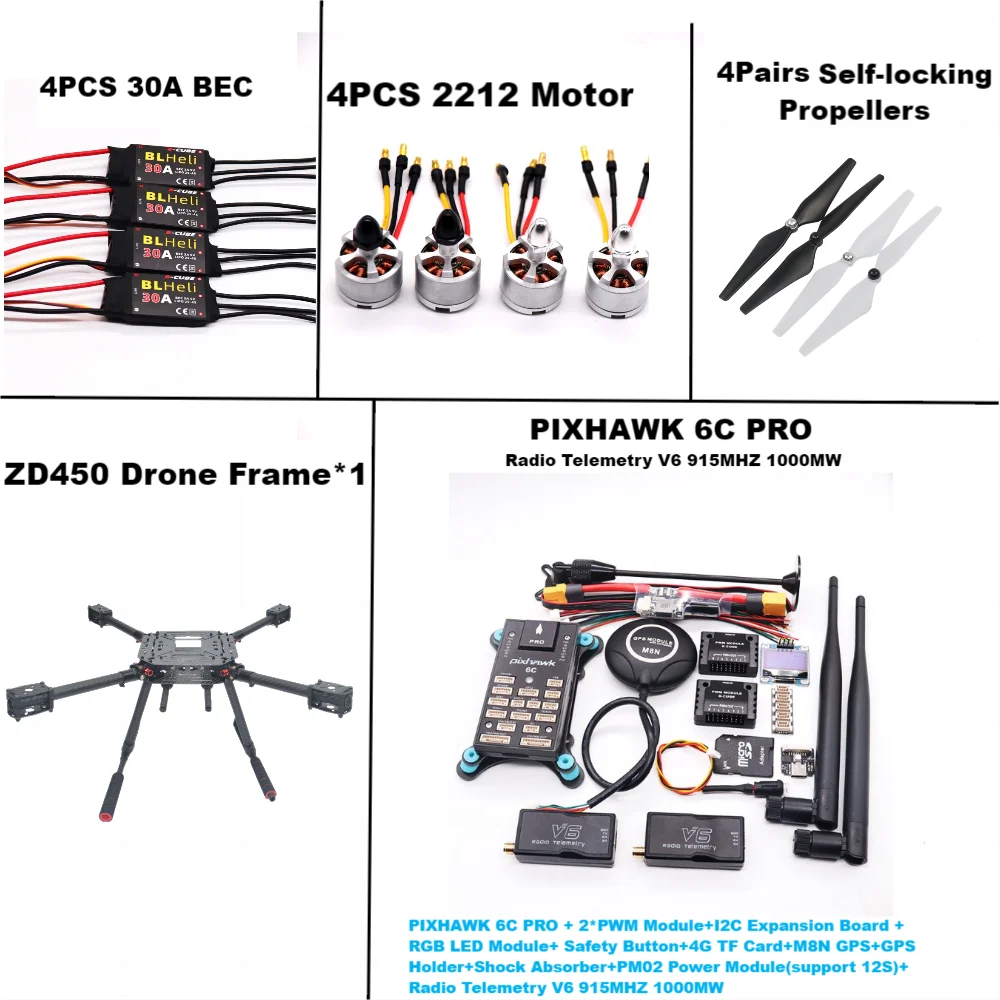
F450 + 4 PCS BLHELI 30A + 4 pares 1045 hélices + 4 PCS 2212 920KV motor +
PIXHAWK 6C PRO +GPS M9N+ Módulo de alimentação 3DR + Suporte GPS + Amortecedor + Botão de segurança e 2 * CARTE PWM 4G TF + 3 linhas (4PGH1.25,6PGH1.25,2.54 pinos)
Pacote alto:
F450 + 4 PCS BLHELI 30A + 4 pares 1045 hélices + 4 PCS 2212 920KV motor +
PIXHAWK 6C PRO+2*PPM+I2C+RGB LED+OLED+GPS M9N+ Módulo de potência 3DR + Suporte GPS + Amortecedor +Carro 4G TF+Botão de segurança + 3 linhas (4PGH1.25,6PGH1.25,2.54 pinos)
F450 + 4 PCS BLHELI 30A + 4 pares 1045 hélices + 4 PCS 2212 920KV motor +
F450 + 4 PCS BLHELI 30A + 4 pares 1045 hélices + 4 PCS 2212 920KV motor +
F450 + 4 PCS BLHELI 30A + 4 pares 1045 hélices + 4 PCS 2212 920KV motor +




 Moldura 450:
Moldura 450:







1045 hélices


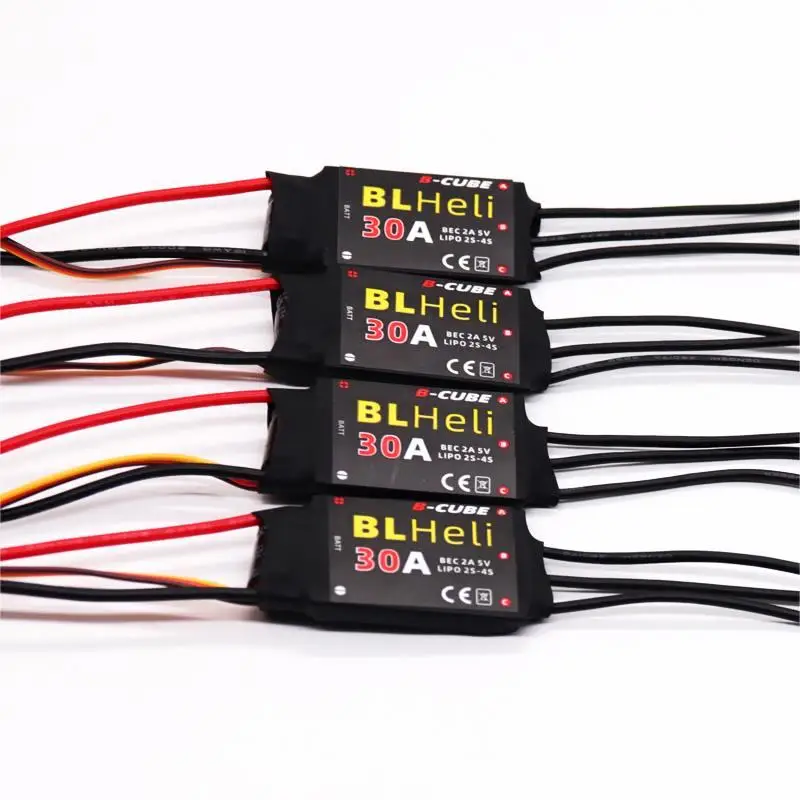
 O Módulo OLED pode exibir algumas mensagens.
O Módulo OLED pode exibir algumas mensagens.
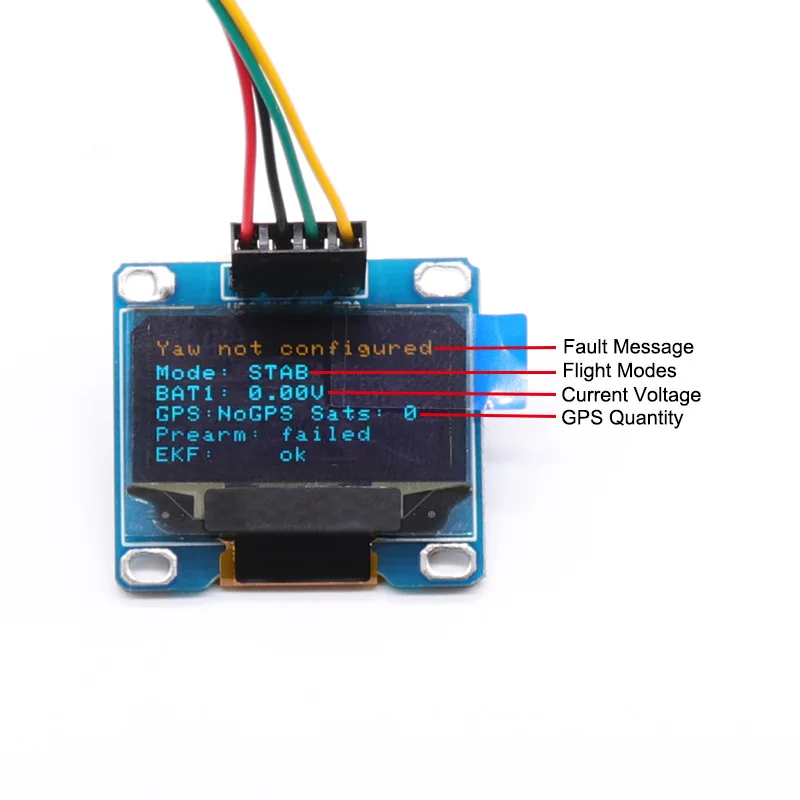
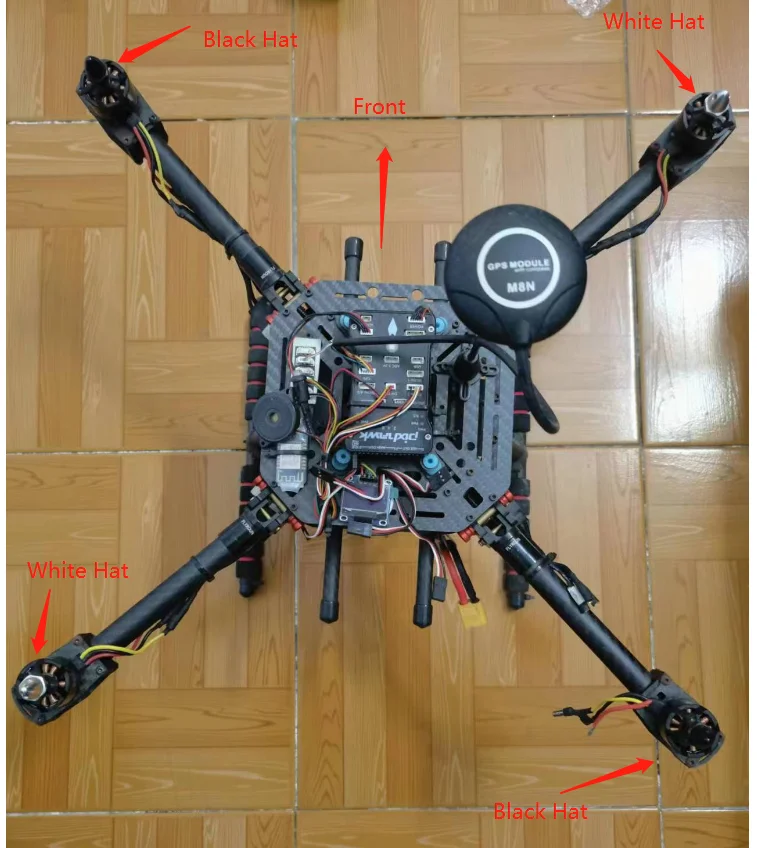
Este artigo explica como conectar os ESCs, motores e hélices a um piloto automático.O Pixhawk é usado como exemplo, mas outros pilotos automáticos são conectados de forma semelhante.
Conecte os fios de alimentação (+), terra (-) e sinal (s) de cada ESC aos pinos de saída principais do piloto automático por número do motor.Encontre o tipo de quadro abaixo para determinar a ordem atribuída dos motores.

Legenda para diagramas de ordem motora
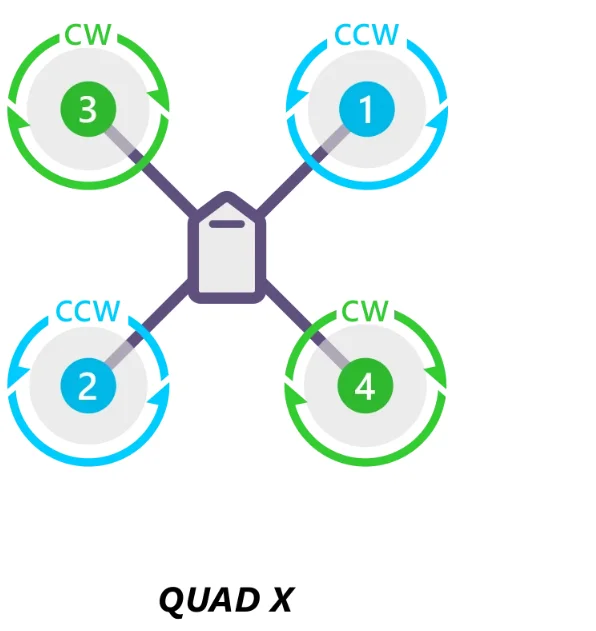
Quadricóptero
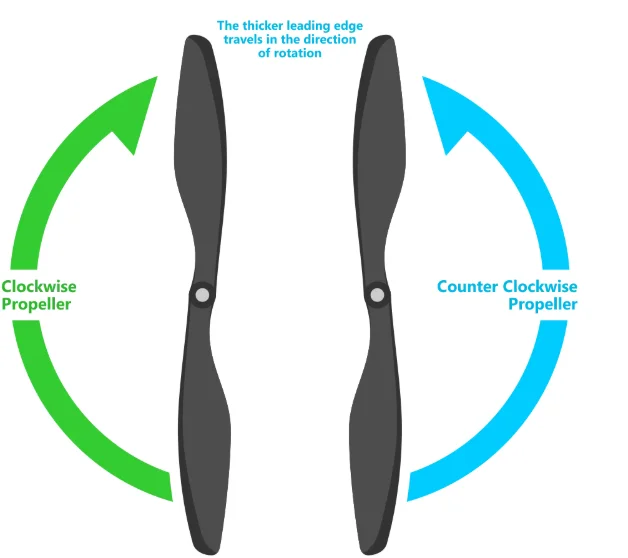
Reconhecimento de hélices no sentido horário e anti-horário






Avaliações
Ainda não existem avaliações.