



- High-concerned chemical: None
- Output Power: <18.65
- Model Number: TD-8120MG
- Type: Micro Motor
- Protect Feature: Totally Enclosed
- Brand Name: YIDI
- Origin: Mainland China
- Certification: CCC,ROHS,CE
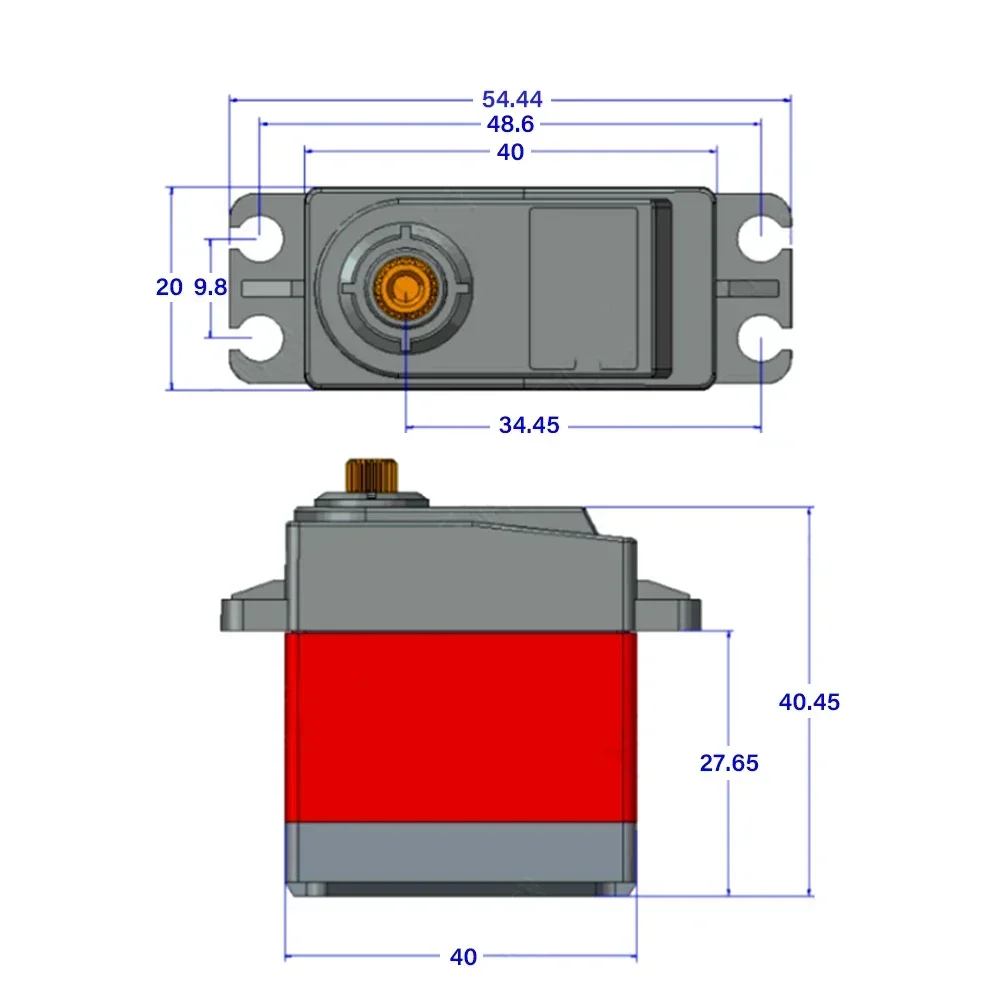
- Dimension: 54.44mm x 40.45mm x 20mm
- Rotation Angle: 0-180°/0-270°/360°(Continuous Rotation)
- Operation Voltage: 4.8 - 7.4Volts
- Gear Material: Metal
- Shell: Engineering plastics+Aluminum alloy
- Operating Mode: Digital
- Control Signal: PWM(1.5ms is the central)
If need Analog Servo, please click the photo below to buy!
|
|
|
|
|
|
|
|
|
|








Note:
1. 360 Degree Servo rotates continuously. If need to control the angle, plesae choose the option 0-180 Degree or 0-270 Degree Servo
2. For 0-180 degree or 0-270 degree servo, some controllers can not control the angle accurately; please use a professional PWM Servo Controller to control the angle, as shown in the video: https://youtu.be/zv6vd7eud_o
YIDI Micro TD-8120MG Digital Servo Motor 180 270 360 Degree High Torque Metal Gear Servomotor 20kg For RC Car Helicopter Arduino Robot
Features:
Compliant with most standard receiver connector: Futaba, Hitec, Sanwa, GWS etc...
Great for truck, Boat, Racing Car, Helicopter and Airplane.
Power Supply: Through External Adapter.
Connector Wire Length 300mm
Specification:
Product Model: TD-8120MG
Dimension: 54.44mm x 40.45mm x 20mm
Rotation Angle: 0-180°/0-270°/360°(Continuous Rotation)
Operation Voltage: 4.8 - 7.4Volts
Operating Speed: 0.25sec/60 degrees (4.8V)
Operating Speed: 0.14sec/60 degrees (7.4V)
Locked-rotor Torque: 19.8kg.cm (4.8V)
Locked-rotor Torque: 23.6kg.cm (7.4V)
Locked-rotor Current: 2400mA (4.8V)
Locked-rotor Current: 3100mA (7.4V)
Operating Temperature: 0 ℃- 55 ℃
Shell: Engineering plastics+Aluminum alloy
Gear Material: Metal
Motor: Carbon brush motor
Dead Band Width: 5us
Operating Mode: Digital
Control Signal: PWM(1.5ms is the central point)
Plug Type: JR, FUTABA General
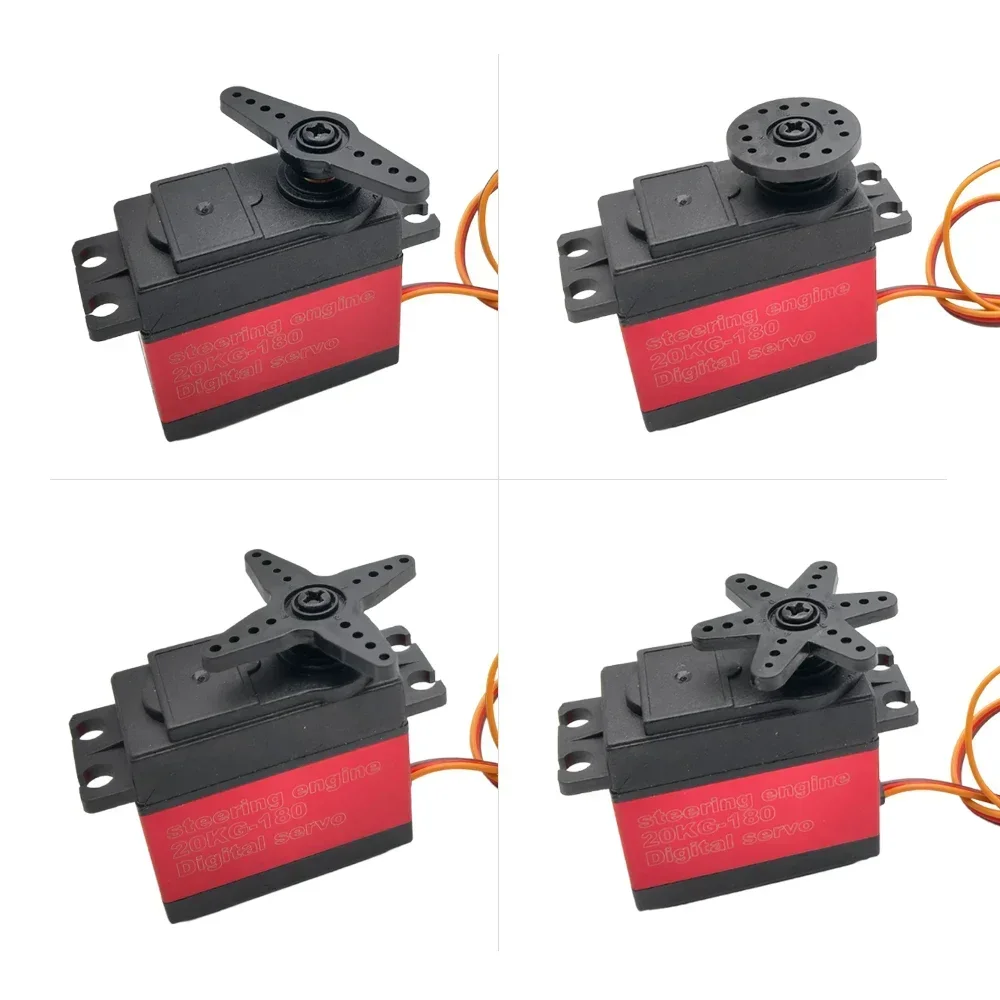
Accessories: Multi-arm, Fixing screws(AS the picture shows)
Connector Wire: 300mm(Brown: Negative; Red: Positive; Orange: Pulse Input)
Steering Gear Control:
The control of the steering gear generally requires a time base pulse of about 20ms, and the high level part of the pulse is generally the angle control pulse part in the range of 0.5ms~2.5ms.
1. Servo 0-180/0-270 Degree
Can control the angle with PWM(0.5ms~2.5ms)
2. Servo 360 Degree
360 Degree Servo rotates continuously. There is no 0-360 degree angle control function. If need to control the angle, plesae choose the option 0-180 Degree or 0-270 Degree Servo
Corresponding Various Angles and Control Signals of TD-8120MG Servo
|
Angle |
Signal Circle |
High Time |
Ditrection |
|
0-180° |
50Hz |
0.5-2.5ms |
Counterclockwise |
|
0-270° |
50Hz |
0.5-2.5ms |
Counterclockwise |
|
360°continuous |
50Hz |
1.0-2.0ms |
1.0ms Clockwise |
|
1.5ms Stopped |
|||
|
2.0ms Counterclockwise |
The direction the servo rotates all depends on the signal the servo is receiving
Packing: 1 x TD-8120MG Servo (Including Accessories)





GUIDE
1. The servo angle changes with the PWM control signal.
Many newcomers find that the servo angle is only about 90 degrees when they test the servo, because their control signal has a 1ms signal width (corresponding control signal 1-2ms).
The normal 180-degree angle corresponds to a 2ms signal width (corresponding control signal 0.5-2.5ms).
More than 99% of the controllers on the market have a control signal range of 1-2ms, and simple servo testers also have a 1-2ms control signal range.
This data was obtained using an oscilloscope.
2. Regarding the servo power supply, many newcomers find that the servo cannot work properly, is uncontrollable, shakes, or moves randomly after receiving the servo.
Their working voltage is also within the normal range. What could be the problem?
Often, they overlook an important issue: the supply current. We learned in physics that Power = Voltage * Current.
Suppose our servo power is 10W, and the supply voltage is 5V, then our current should be 2A to reach the 10W power.
If either voltage or current does not meet the requirements, the servo will not work properly.
The servo is composed of a motor and some other accessories. The motor has a starting current when powered on, which is generally 4-7 times the rated current.
(For those interested, you can find information about motor starting current online.)
3. Conclusion: A servo must meet 3 requirements for normal operation:
(1) The supply voltage must be normal.
(2) The supply current must be sufficient.
(3) The control signal must be correct.





Avaliações
Ainda não existem avaliações.