




- High-concerned chemical: None
- Certification: CE
- Origin: Mainland China
- Brand Name: YUN DUAN
- Model Number: DB60-00630A6-A+FP100S-40
- Encoder type: 17 Bit/21 Bit Single-turn Magnetic Absolute Encoder
- Rated Speed: 3000rpm
- MAX. Speed: 6000rpm
- Input Voltage: Single phase AC220V-15%~+ 10% 50/60Hz
- Keywords 1: 17 Bit Absolute Servo Motor
- Keywords 2: RS485 servo motor
- Keywords 3: Purse servo
- Keywords 4: Magnetic Servo
- Keywords 5: 400W servo
- Keywords 6: servo motor 750w
- Keywords 7: 60 Servo
- Keywords 8: 80 Servo
- Keywords 9: servo motor 1kw
- Keywords 10: magnetic motor
- Keywords 11: 600W servomotor
- Keywords 12: 200W servo
- Keywords 13: servomotor
- Keywords 14: 17 Bit servo
- Keywords 15: Encoder servo
- Keywords 16: Absolute Encoder motor
- Keywords 17: Encoder motor
- Keywords 18: 750w ac servo motor kit
- Keywords 19: ac servo motor 1000w
- Keywords 20: ethercat servo 100w
- Keywords 21: servo motor 1 kw
- Keywords 22: 60 servo motor
- Keywords 23: 40 servo motor
- Keywords 24: 80 servo motor





1* Servo Motor
1* Servo Driver
1* 3 Meter Power Cable
1* 3 Meter Encoder Cable
1* 1 Meter 5V/24V Pulse Cable (Just for pulse driver)
PS: 1. The cable length can be customized.
2. Product Catalog: Please click here to view
3. Driver user manual:Please click here to view



Motor Model |
DB40-00330 |
DB60-00630 |
DB60-01330 |
DB60-01930 |
DB80-02430 |
DB80-03230 |
Flange (mm) |
40 |
60 |
60 |
60 |
80 |
80 |
Rated power (KW) |
0.1 |
0.2 |
0.4 |
0.6 |
0.75 |
1 |
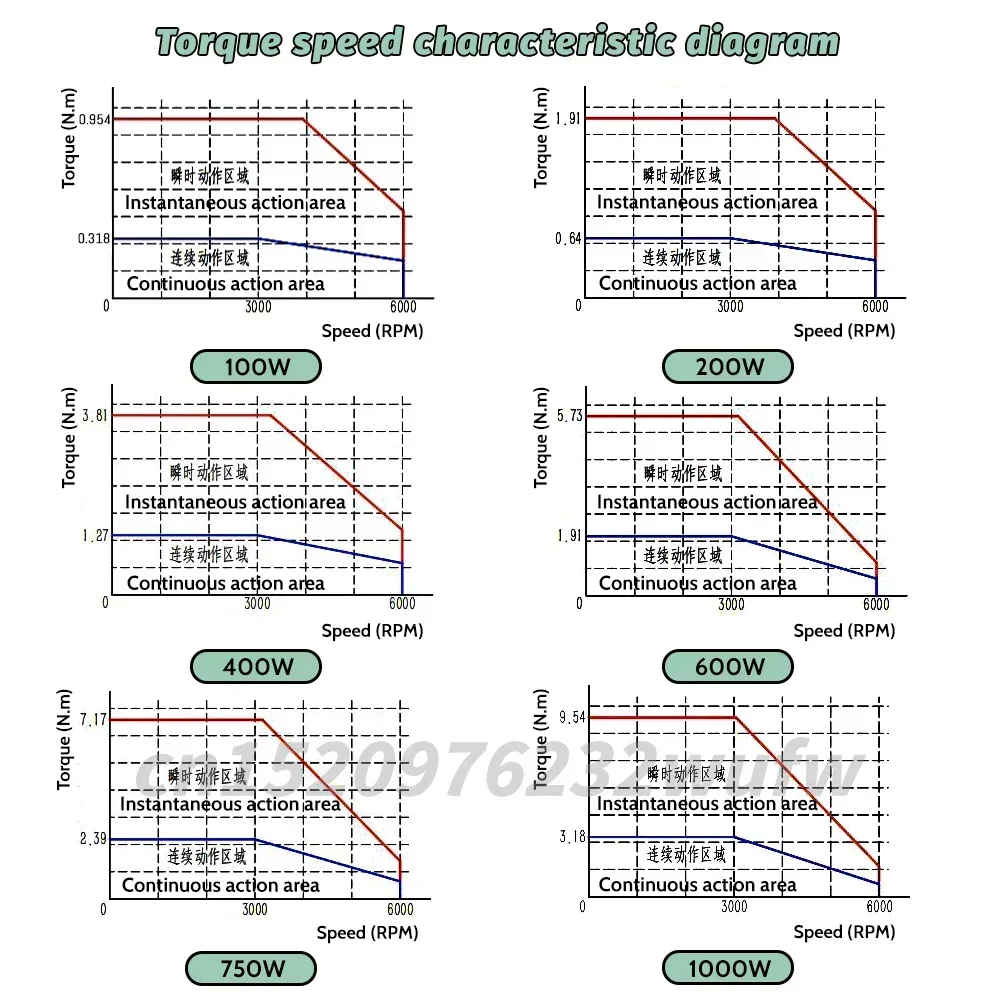
Rated torque (N.m) |
0.318 |
0.64 |
1.27 |
1.91 |
2.39 |
3.18 |
Instantaneous MAX torque (N.m) |
0.954 |
1.91 |
3.81 |
5.73 |
7.17 |
9.54 |
Rated current (A) |
1.1 |
1.7 |
2.5 |
3.6 |
4.7 |
5.8 |
Instantaneous MAX current (A) |
3.5 |
5.7 |
7.5 |
11.2 |
14.5 |
18.1 |
Reverse electromotive force (V/Krpm) |
23 |
23 |
31 |
35 |
33 |
34 |
Torque constant (N.m/A) |
0.29 |
0.38 |
0.51 |
0.53 |
0.51 |
0.55 |
Line resistance (Ohms) |
20.6 |
4.57 |
3.24 |
2.2 |
1.09 |
0.73 |
Winding (wire to wire) inductance (mH) |
10.3 |
4.3 |
5.8 |
4.3 |
4.6 |
2.7 |
Rotor inertia (kg·m ²) |
0.066x10-4 |
0.28x10-4 |
0.52x10-4 |
0.76x10-4 |
1.48x10-4 |
2.27x10-4 |
Rated voltage (V) |
AC 220 |
|||||
Rated speed (rpm) |
3000 |
|||||
Peak speed (rpm) |
6000 |
|||||
Extreme logarithm |
5 |
|||||
Insulation level |
F(155℃) |
|||||
Encoder type |
Single-turn 17 bits absolute encoder |
|||||
Driver Model |
P100S-40 |
P100S-75 |
P100E-40 |
P100E-75 |
P100S-40-CAN |
P100S-75-CAN |
|
Output power |
0.1KW~0.4KW |
0.75KW~1KW |
0.1KW~0.4KW |
0.75KW~1KW |
0.1KW~0.4KW |
0.75KW~1KW |
|
Type |
Pulse |
EtherCAT |
CANopen |
||||
Main circuit input power supply |
Single phase AC220V-15%~+10% 50/60Hz |
||||||
Protection function |
Overspeed/main power supply overvoltage/undervoltage/overcurrent/overload/encoder abnormality/control power supply abnormality/position deviation, etc |
||||||
Monitoring function |
Speed/current position/command pulse accumulation/position deviation/motor torque/motor current/operating status, etc |
||||||
Control output |
Servo ready/servo alarm/positioning completed/mechanical braking, etc |
||||||
Applicable load |
Less than 3 times the motor inertia |
||||||
Display Operation |
5-digit LED digital display with 4 operation buttons |
||||||
Communication methods |
RS485 |
EtherCAT |
CANopen |
||||
Energy consumption braking |
Supports both built-in and external |
Internal/External |
|||||
Control mode |
0: Position control method; 1: Speed control mode; 2: Torque control method; 3: Hybrid control method for position and speed; 4: Position torque hybrid control method; 5: Speed torque hybrid control method |
Position control mode/speed control mode/trial operation control mode/JOG control mode/torque control mode |
|||||
Control input |
1: Servo enable, 2: Alarm clear, 3: CCW drive inhibit, 4: CW drive inhibit, 5: Deviation counter reset, 6: Command pulse inhibit, 7: CCW torque limit, 8: CW torque limit, etc |
1: Negative limit 2: Positive limit 3: Origin signal 4: CCW drive inhibit 5: CW drive inhibit 6: Deviation counter reset 7: Command pulse inhibit 8: CCW torque limit 9: CW torque limit |
|||||
Position control |
Input method |
0: Pulse+direction |
Bus based communication |
||||
Input electronic gear ratio |
Gear ratio numerator: 1-32767; |
Gear ratio shaft accuracy: 1-131072;Gear ratio motor accuracy: absolute values of 17 and 23 bits |
|||||
Input and output signals |
Input and output signals |
/ |
8 DI signals can be used for signal allocation changes: servo enable, alarm clear, forward and reverse drive inhibit, zero speed box position, zero command, command reverse, speed selection, torque selection, pulse input inhibit, zero return signal, probe, forward limit, negative limit, etc |
||||
Digital output signal |
6 DO signals can be used for signal allocation changes: servo ready, alarm zero speed, positioning completed, and speed reached. Torque reached. Electromagnetic brake, servo operation in progress, positioning approach, torque limitation in progress, speed limitation in progress |
||||||



















Avaliações
Ainda não existem avaliações.