UGV Rover ROS 2 Robô 4WD AI de código aberto de 6 rodas, controladores duplos, visão de computador, vem com tutoriais interativos, corpo todo em metal, flexível e expansível, adequado para Raspberry Pi 4B / Raspberry Pi 5
Recomendação de seleção para iniciantes
É recomendado comprar Kit UGV Rover PT PI5 ROS2 se você quiser usar Raspberry Pi como o controlador host, ou o Kit UGV Rover PT Jetson Orin ROS2 se você quiser usar NVIDIA Jetson Orin Nano como o controlador host
Ambos os kits oferecem excelente confiabilidade e estão equipados com uma câmera de profundidade Pan-Tilt de 2 eixos de alto torque, D500 Lidar e OAK-D Lite.Fornecemos funcionalidades básicas abrangentes e tutoriais ROS2 para ajudar os iniciantes a aprender e aplicar rapidamente conhecimento de robótica.Os kits de robôs oferecem expansibilidade superior, permitindo aos usuários implementar diversas aplicações.
Introdução ao nome do modelo do produto
O nome do modelo do produto inclui: tipo de chassi, Opção Pan-Tilt, modelo do controlador host, e tipo de função.
Nome do modelo |
descrição |
Módulo correspondente |
Tipo de chassi |
UGV Rover |
Chassi 4WD de 6 rodas |

|
Besta UGV |
Chassi trançado off-road com suspensão independente |
|
Opção Pan-Tilt |
PT |
com Pan-Tilt de 2 eixos |
|
Controlador host |
Jetson Orin |
Usando Jetson Orin Nano como controlador de host. Nota: os kits com “Aceitar” no final do nome do modelo não incluem o controlador host e exigem que os usuários preparem sua própria placa Jetson Orin. |
|
PI 5 |
Usando Framboesa Pi 5 como controlador de host. Nota: os kits com “Aceitar” no final do nome do modelo não incluem o controlador host e exigem que os usuários preparem seu próprio Raspberry Pi 5 e seu dissipador de calor. |
|
PI 4B |
Usando Raspberry Pi 4B como controlador de host. Nota: os kits com “Aceitar” no final do nome do modelo não incluem o controlador host e exigem que os usuários preparem seu próprio Raspberry Pi 4B e seu dissipador de calor. |
|
Aceitar |
Os kits com “Acce” no final do nome do modelo não incluem o controlador host, você pode escolher a versão Acce se tiver uma placa host. |
|
Tipo de função |
Kit AI |
Kit AI básico com câmera ultra grande angular de 5 MP, vem com funcionalidade de visão computacional e tutoriais. |
|
Kit ROS2 |
Com base no AI Kit, equipado com D500 360° Câmera de profundidade Lidar e OAK-D Lite, vem com funcionalidades e tutoriais ROS2 completos. |
|
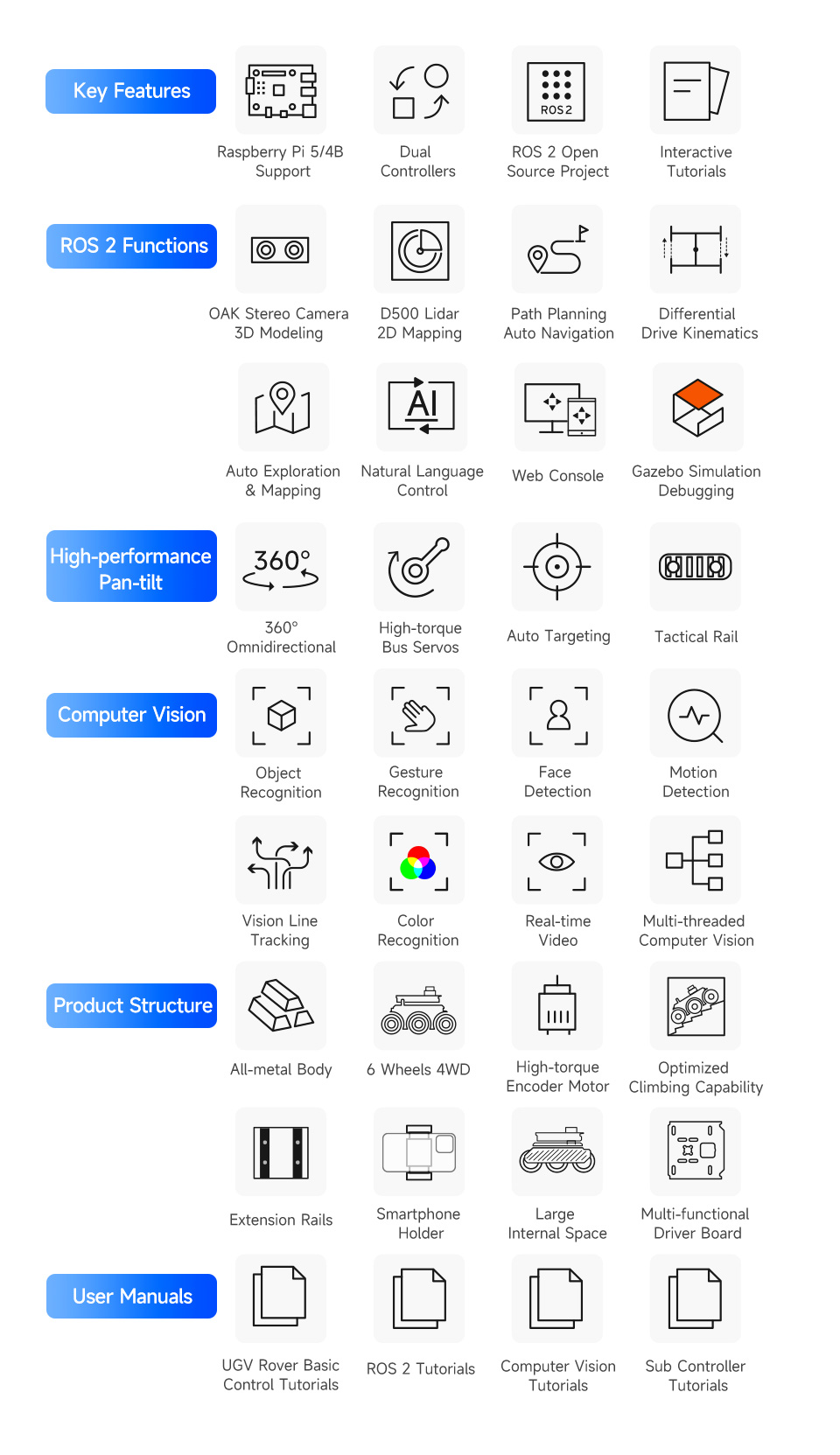
Recursos rapidamente
O Kit UGV Rover ROS2 é um robô AI projetado para exploração e criação com excelente potencial de expansão, baseado em ROS 2 e equipado com câmera Lidar e profundidade, conectando perfeitamente sua imaginação com a realidade.Adequado para entusiastas de tecnologia, criadores ou iniciantes em programação, é a escolha ideal para explorar o mundo da tecnologia inteligente.
Equipado com o computador Raspberry Pi de alto desempenho para enfrentar os desafios de estratégias e funções complexas e inspirar sua criatividade.Adota design de controlador duplo, combina as funções de IA de alto nível do controlador host com as operações básicas de alta frequência do subcontrolador, tornando cada operação precisa e suave.
Fácil de ser controlado remotamente via UGV Rover Web Application sem baixar nenhum software, basta abrir seu navegador e iniciar sua jornada.Você pode usar as funções básicas ROS 2 do robô sem instalar uma máquina virtual no PC.Suporta transmissão de vídeo em tempo real com alta taxa de quadros e múltiplas funções AI Computer Vision, o UGV Rover é uma plataforma ideal para concretizar suas ideias e criatividade!
Seleção de kits
Módulo Pan-Tilt opcional (somente versão PT) para melhor potencial de expansão.Opções para controlador host (Raspberry Pi 4B / Raspberry Pi 5), ou você pode escolher a versão Acce se tiver um Pi.Todos os kits estão equipados com câmera, acessórios de montagem, cartão TF, ventilador de resfriamento, etc.
Modelo |
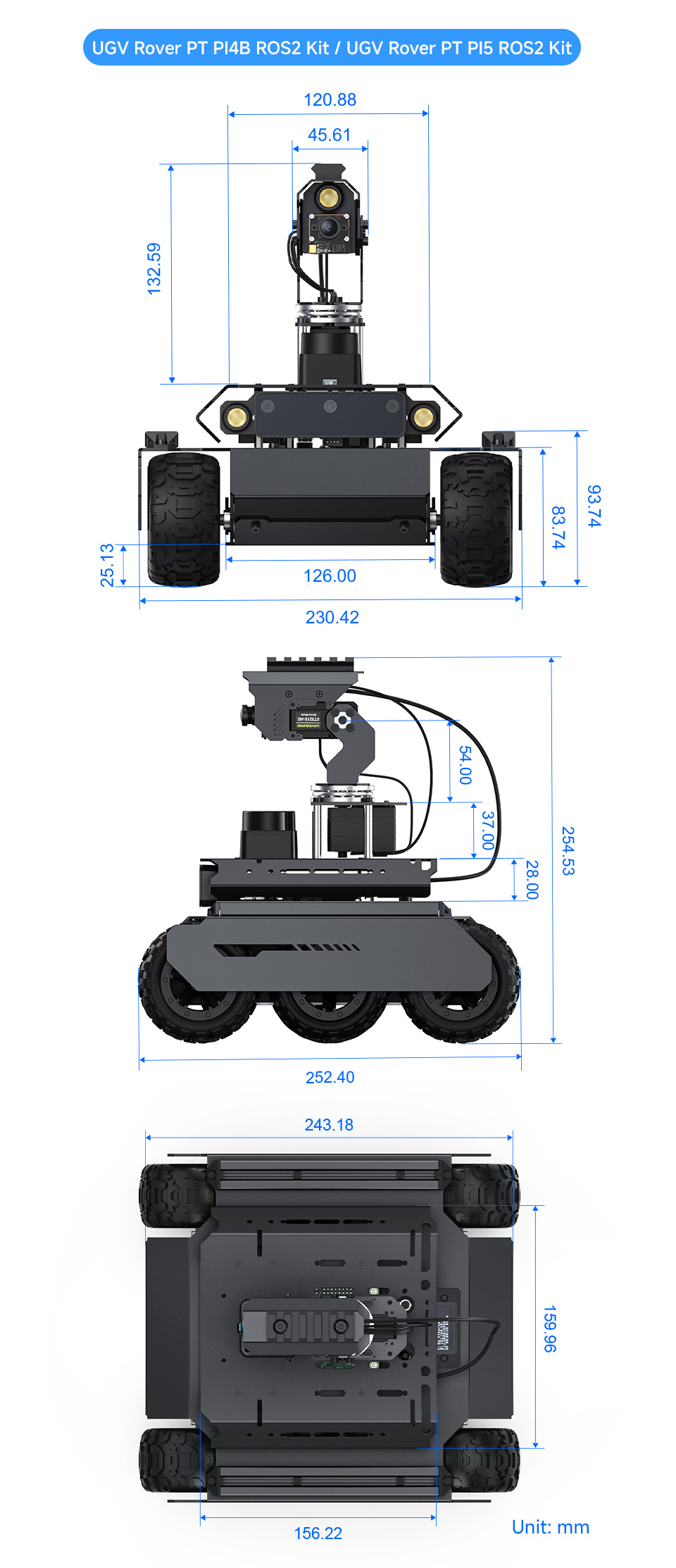
Kit UGV Rover PT PI4B/PI5 ROS2 |
Aceitar kit UGV Rover PT PI4B/PI5 ROS2 |
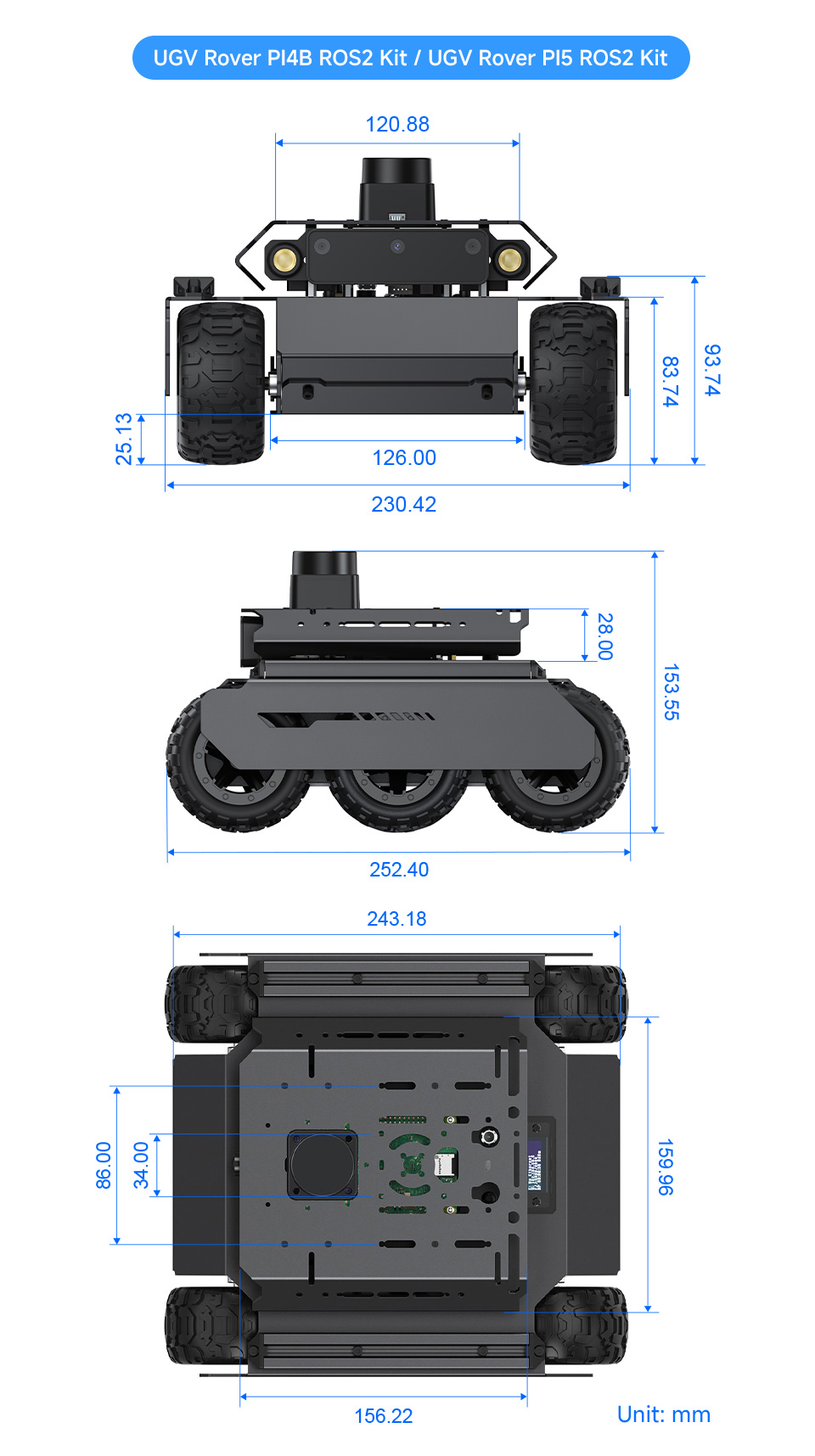
Kit UGV Rover PI4B/PI5 ROS2 |
Aceitar kit UGV Rover PI4B/PI5 ROS2 |
|
|
|
|
Dimensión |
230,42×252,40×254.53mm |
230,42×252,40×153.55mm |
Peso |
2251±5g |
1935±5g |
Altura do chassi |
25 mm |
Pan-Tilt DOF |
2 |
- |
TORQUE SERVO Pan-Tilt |
30KG.CM |
- |
SERVO Pan-Tilt |
Servo ST3215 |
- |
Controlador host |
RPi 4B 4GB / RPi 5 4GB |
NÃO incluído |
RPi 4B 4GB / RPi 5 4GB |
NÃO incluído |
Suporte ao sistema host |
Livro de Debian |
Versão ROS2 |
ROS2-HUMBLE-LTS |
Câmera FOV |
160° |
Fonte de alimentação |
Módulo UPS 3S |
Suporte de bateria |
Bateria de lítio 18650 x 3 (NÃO incluída) |
Métodos de controle de demonstração |
Aplicação web / programação interativa Jupyter Lab |
Velocidade máxima padrão |
1,3m/s |
Número de rodas motrizes |
4 |
Número de rodas |
6 |
Diâmetro do pneu |
80 mm |
Largura do pneu |
42,5 mm |
Raio mínimo de giro |
0M (rotação in-situ) |
Baseado em Raspberry Pi
Suporta Raspberry Pi 5 / Raspberry Pi 4B, com desempenho de computação poderoso para lidar com tarefas mais complexas, oferecendo mais possibilidades
Conectando com Raspberry Pi 4B
Conectando com Raspberry Pi 5
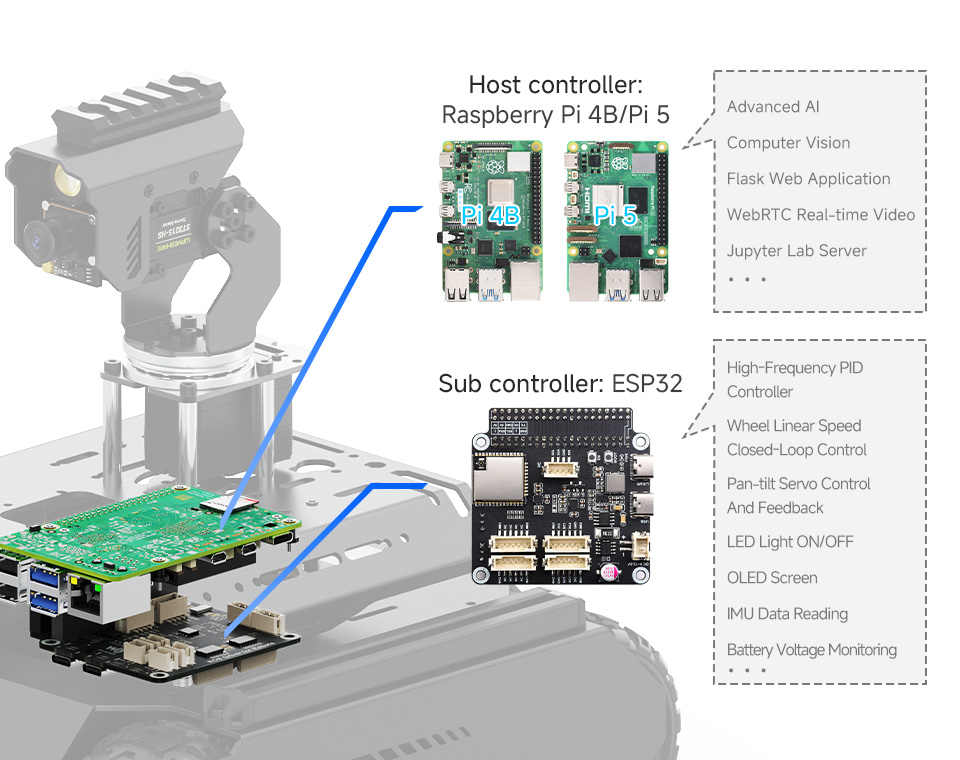
Design de controlador duplo, fornece colaboração eficiente e desempenho atualizado
O controlador host adota Raspberry Pi para visão de IA e planejamento de estratégia, e o subcontrolador usa ESP32 para controle de movimento e processamento de dados do sensor
Raspberry Pi OS + ROS2 Docker
Garante desempenho avançado de tomada de decisão de compatibilidade de robô e sistema ao mesmo tempo.Suporta todas as funções de IA dos produtos anteriores da série AI Kit
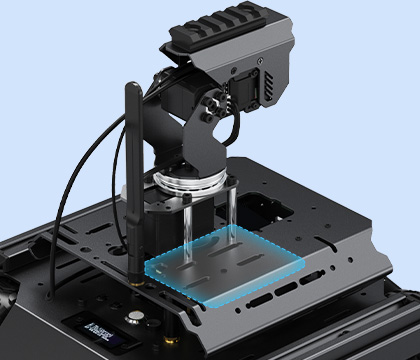
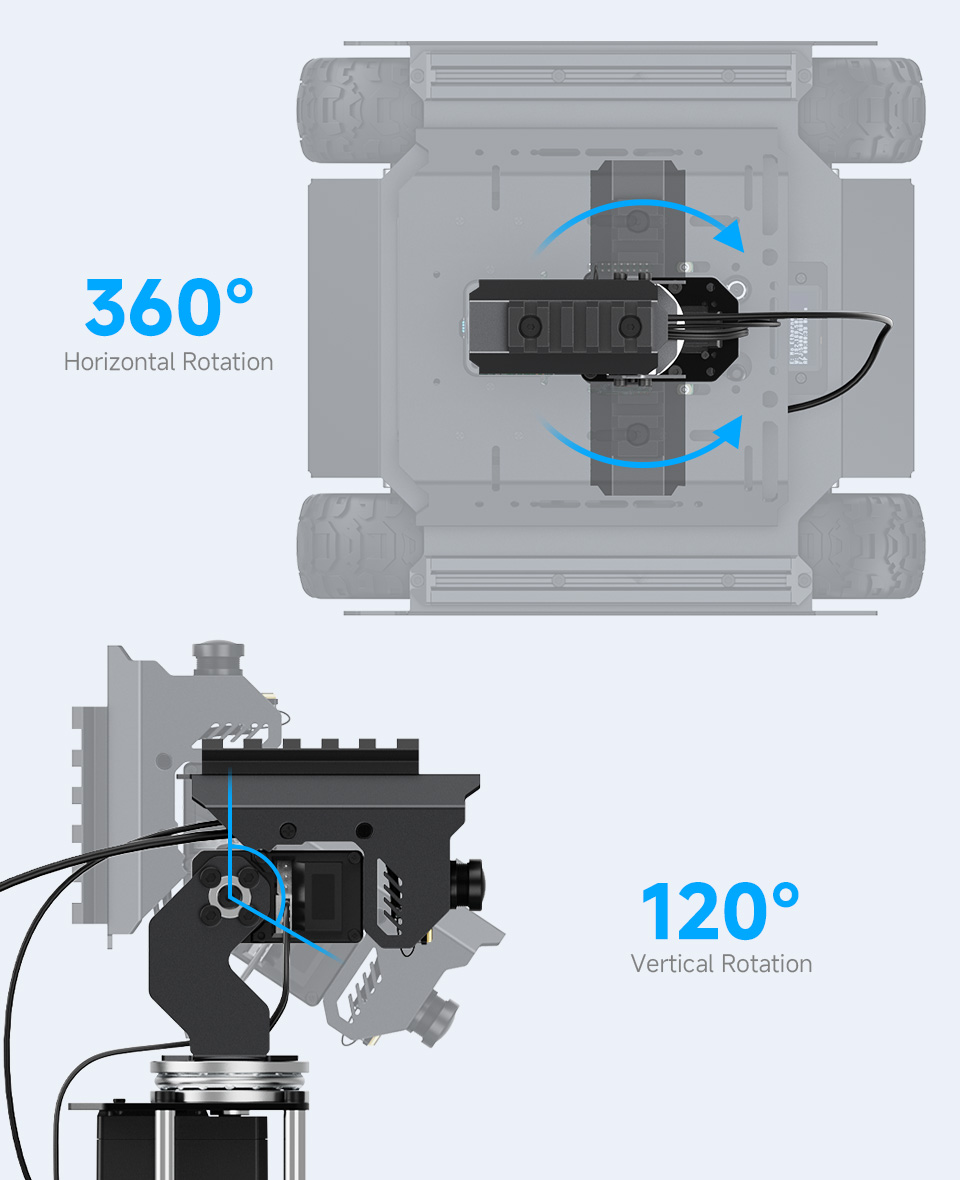
360° Pan-Tilt Omnidirecional flexível
equipado com 5MP 160° câmera grande angular para capturar cada detalhe
O Pan-Tilt adota servos de barramento de alto torque com excelente potencial de expansão, proporcionando uma melhor experiência de controle como jogos FPS
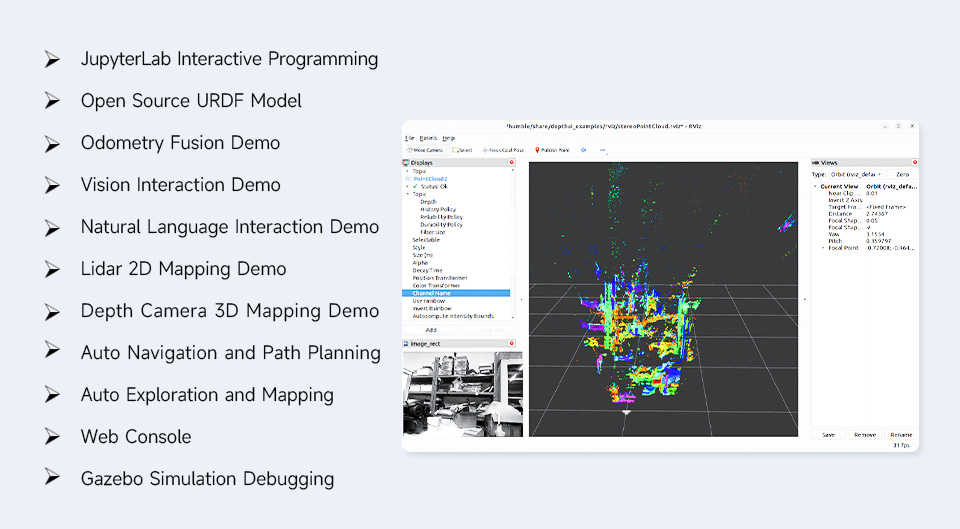
código aberto para todos os recursos de desenvolvimento ROS 2
código aberto para todas as demonstrações do controlador host e do subcontrolador, incluindo arquivo de descrição do robô (modelo URDF), nó de processamento de dados do sensor do subcontrolador, algoritmos de controle cinematático e vários nós de controle remoto
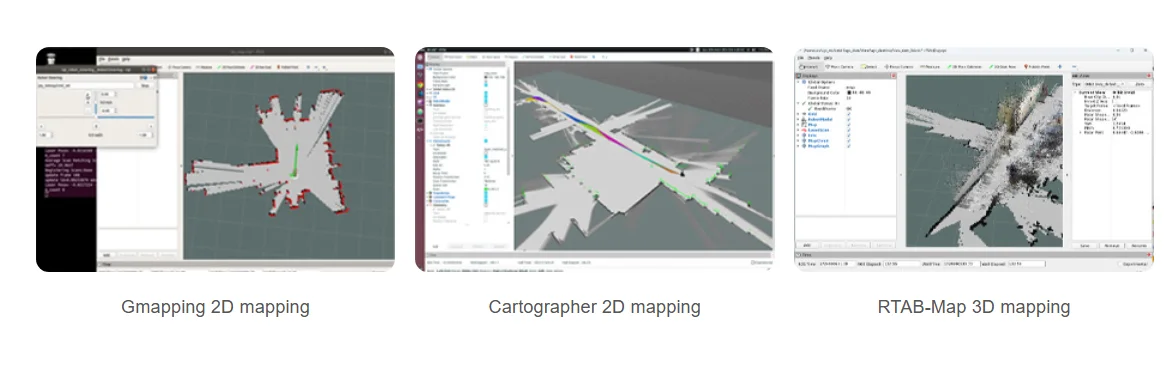
Integra vários métodos de mapeamento ROS 2
Atenda às necessidades de mapeamento em diferentes cenários
vários sensores econômicos
Adota vários sensores com alta relação custo-benefício e praticidade
Exploração e mapeamento automáticos
Usando a SLAM Toolbox para implementar funções de mapeamento e navegação simultaneamente em ambientes desconhecidos, simplificando o processo de execução das tarefas.O robô UGV pode explorar de forma autônoma áreas desconhecidas e completar o mapeamento, adequado para aplicações não tripuladas
Suporta interação de linguagem natural
Adota a tecnologia de modelo de idioma grande (LLM), os usuários podem dar comandos ao robô por idioma natural, permitindo que ele execute tarefas como movimentação, mapeamento e navegação
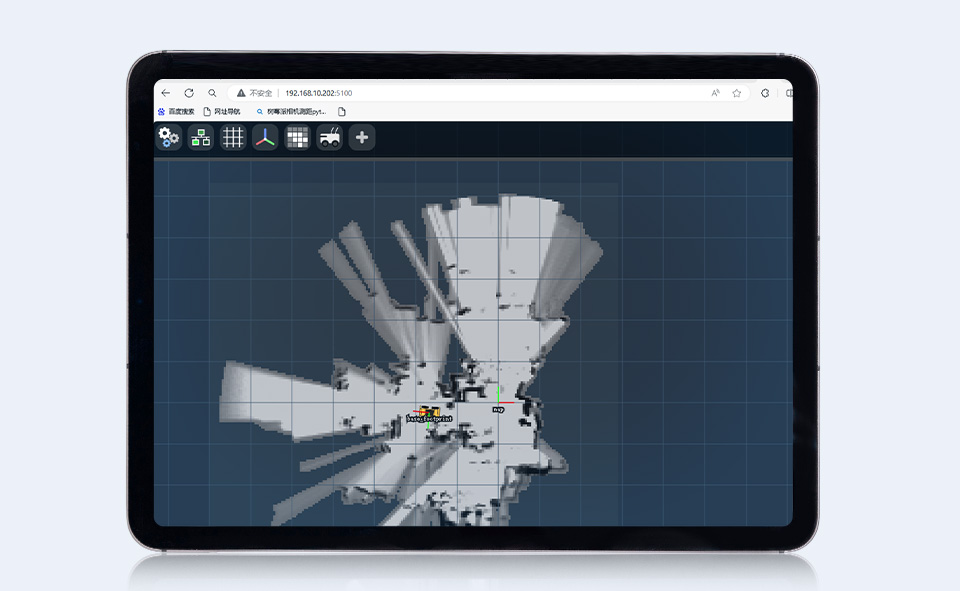
Fornece ferramenta de console Web
Você pode usar as funções básicas do ROS 2 na Web sem instalar uma máquina virtual no PC, suporta operação multiplataforma em tablets Android ou iOS.Os usuários podem simplesmente abrir um navegador e controlar o robô para mover, mapejar, navegar e outras operações
Interação de comando de nó ROS2
Os usuários podem enviar comandos de controle ao robô por meio de um script para realizar operações como movimentação, obtenção da localização atual e navegação para um ponto específico, etc.o que é mais conveniente para o desenvolvimento secundário
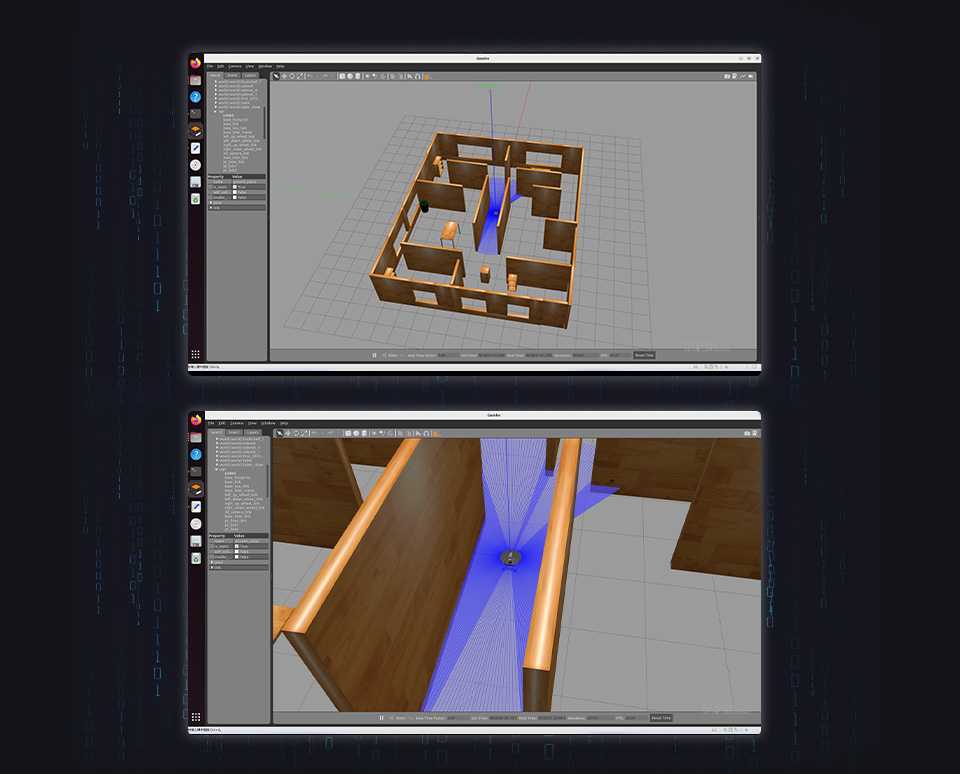
Depuração de simulação de gazebo
Fornece modo robô Gazebo e biblioteca completa de funcionalidades para depuração de simulação, ajudando você a verificar e testar o sistema durante os primeiros estágios de desenvolvimento
Continuando a aventura à medida que a noite cai
Luz LED de alto brilho para garantir imagens nítidas em condições de pouca luz
Adequado para extensão tática
Vem com trilho de 21 mm de largura e servo de barramento de 30 kg. CM de alta precisão e alto torque para extensão tática
apenas para referência, os acessórios na imagem acima NÃO estão incluídos
Trilho de alumínio padrão
Vem com 2 × 1020 trilhos de perfil padrão europeu e suporta a instalação de periféricos adicionais por meio das porcas do barco para atender a diferentes necessidades, expandindo facilmente os cenários de operação especiais
Nota: Apenas o trilho, porcas do barco e parafusos M4 estão incluídos, outros acessórios devem ser adquiridos separadamente.
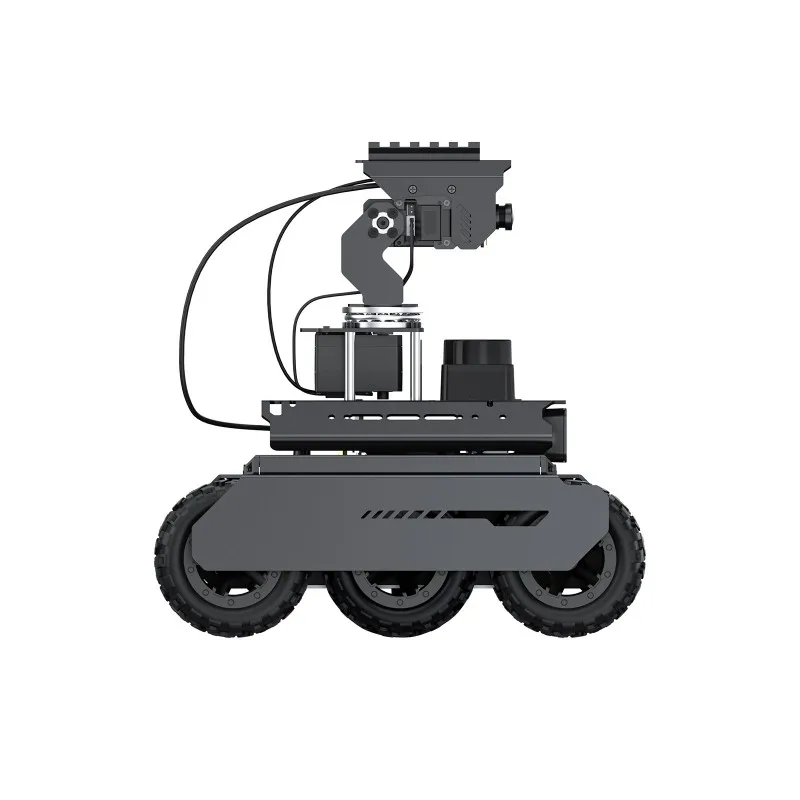
Apoia a condução em terrenos complexos
6 rodas × design 4WD, usando 6 rodas pode fornecer uma plataforma mais estável e maior área de contato, enquanto 4WD pode fornecer maior potência e tração para lidar com vários terrenos e obstáculos
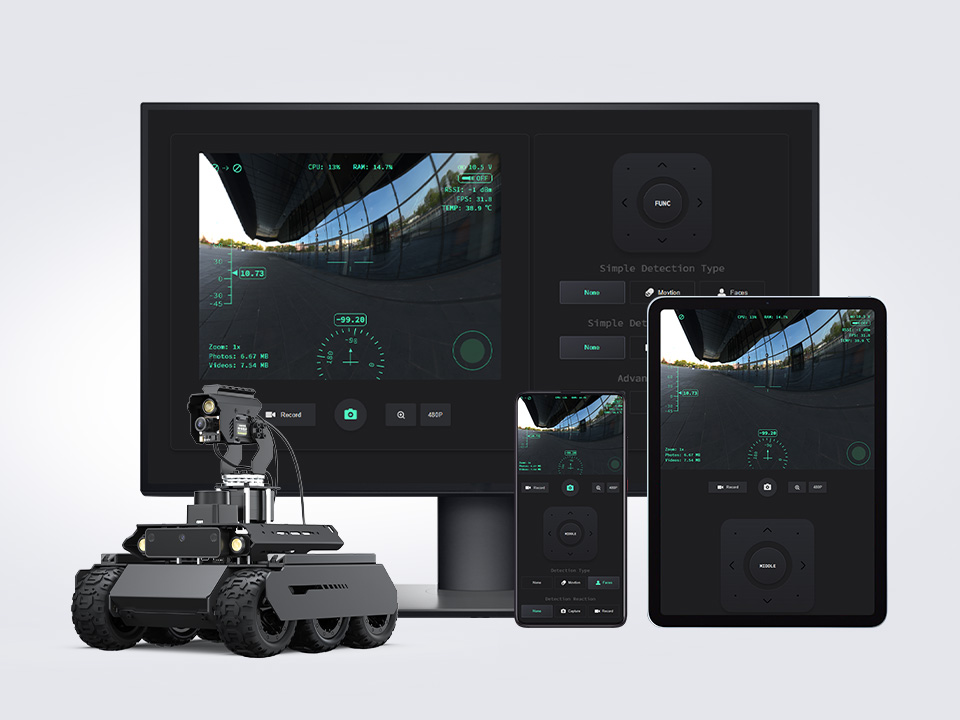
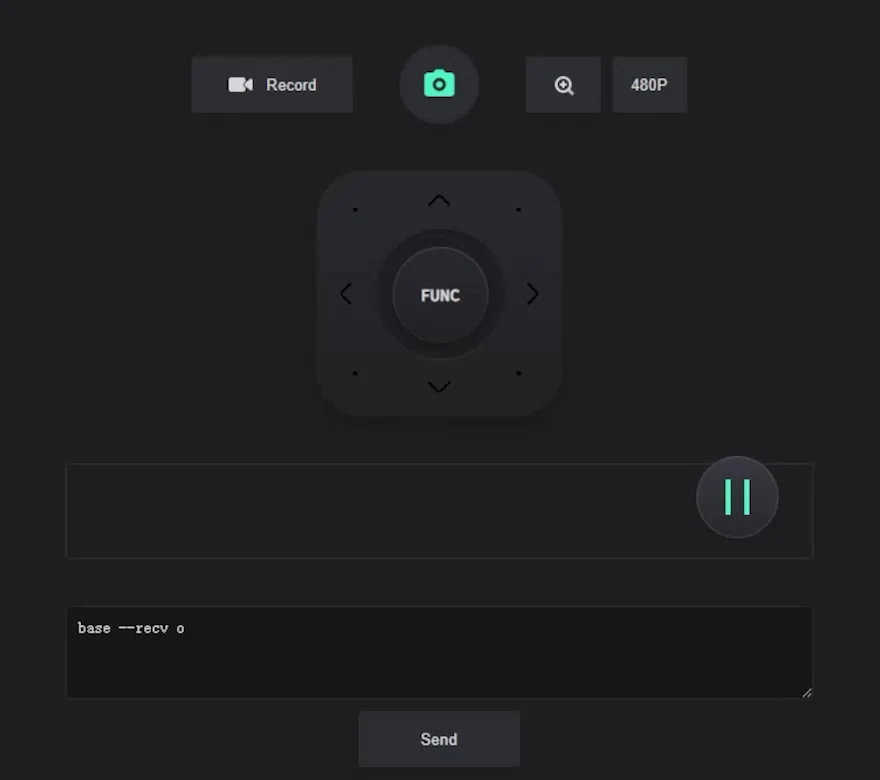
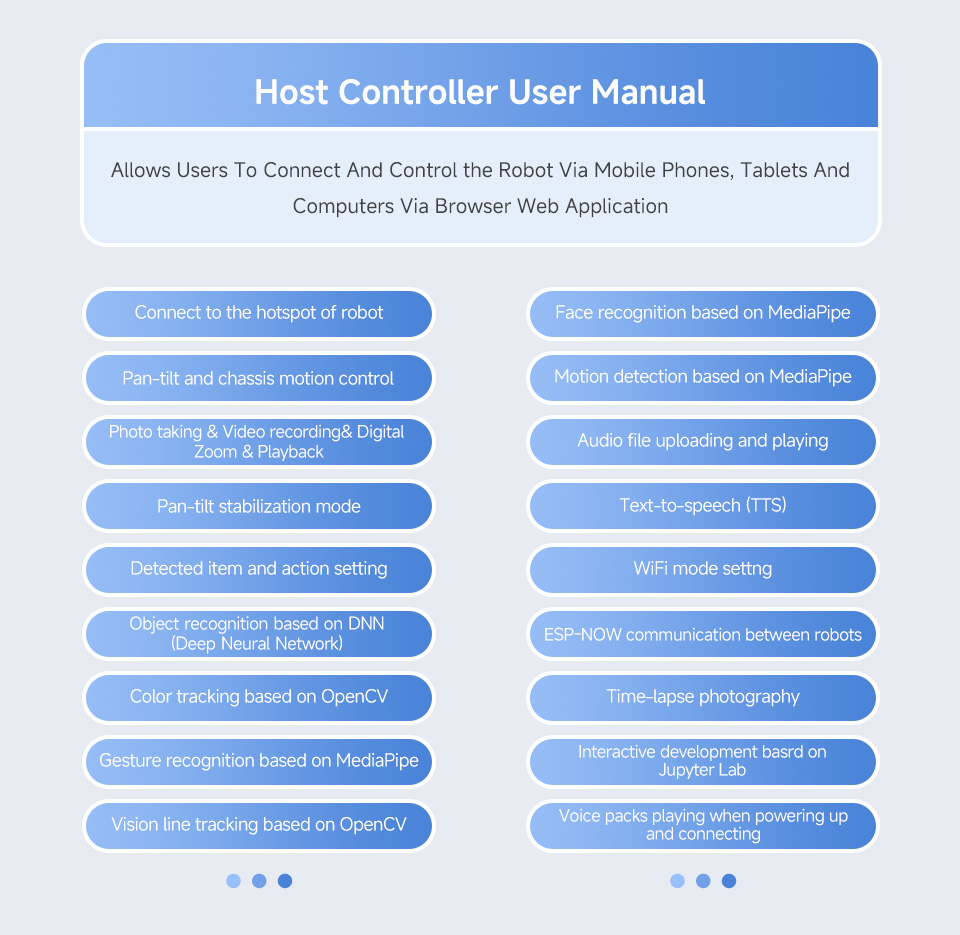
Fácil de controlar via
Aplicação na Web transversal
Não é necessária instalação de aplicativo, permite que os usuários conectem e controlem o robô por meio de telefones celulares, tablets e computadores por meio do aplicativo da web do navegador.Suporta controle de teclas de atalho, como WASD e mouse, por meio de um PC com teclado
Transmissão de vídeo em tempo real WebRTC
Adota o aplicativo web leve Flask, baseado na transmissão em tempo real de latência ultrabaixa WebRTC, usando o idioma Python e fácil de estender, trabalhando perfeitamente com OpenCV
Reconhecimento, rastreamento e direcionamento
baseado em OpenCV para obter reconhecimento de cores e mira automática.suporta controle Pan-Tilt de uma tecla e iluminação LED automática, permite expansão para mais funções
Detecção de rosto:
Captura automática de imagens ou vídeos
baseado em OpenCV para obter reconhecimento facial, suporta captura automática de fotos ou gravação de vídeo assim que um rosto é reconhecido
Reconhecimento inteligente de objetos
suporta o reconhecimento de muitos objetos comuns com o modelo padrão
Reconhecimento de gestos:
Interação AI com linguagem corporal
Combina OpenCV e MediaPipe para realizar o controle por gestos de Pan-Tilt e LED
Controle de gestos para tirar fotos
LED ON/OFF e controle de luz negra
Mais demonstrações de MediaPipe para criação fácil
Tarefas complexas de processamento de vídeo
MediaPipe é uma estrutura de código aberto desenvolvida pela Google para a construção de tubulações de processamento multimídia multiplataforma, fornece um conjunto de componentes e ferramentas pré-construídos, sua capacidade de processamento de alto desempenho permite ao robô responder e processar entradas multimídia complexas, como reais análise de vídeo em tempo real.
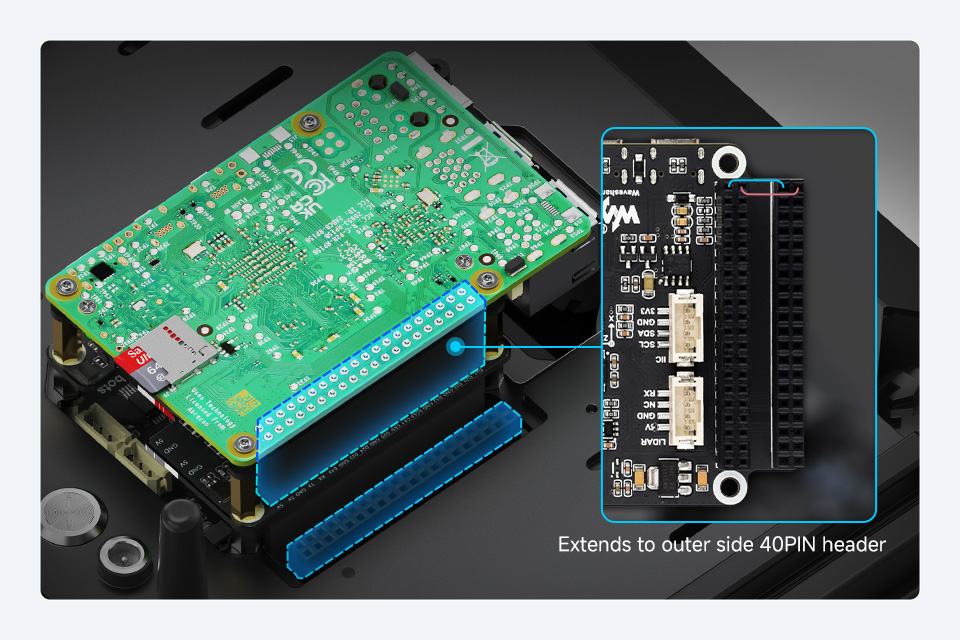
Cabeçalho estendido GPIO 40PIN
O robô ocupa apenas a interface URAT do Raspberry Pi GPIO para comunicação, adaptando o conector lateral externo de 40PIN da placa do driver para expandir mais periféricos e funções
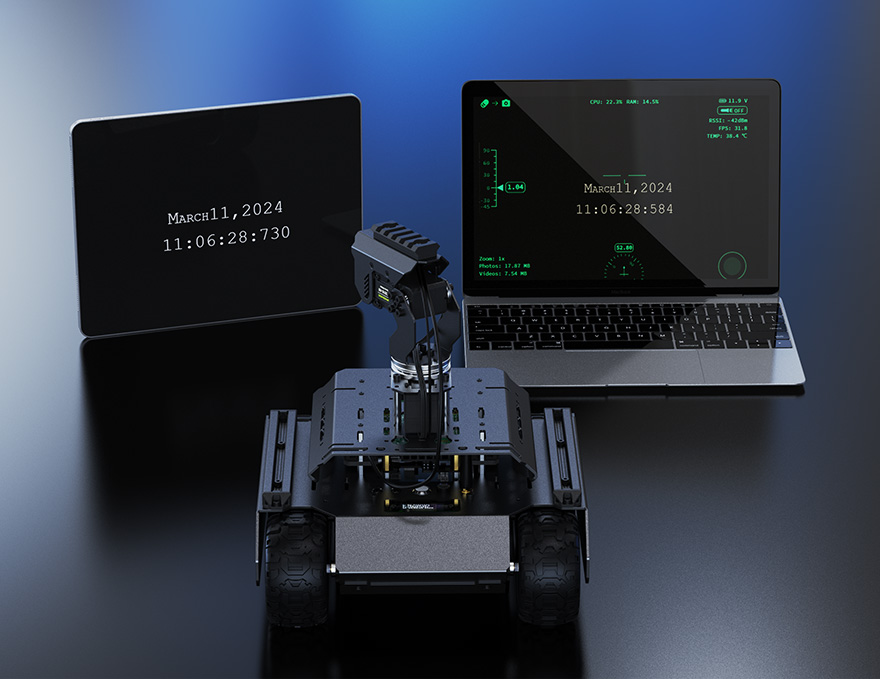
Obta feedback de informações em tempo real
Monitoramento em tempo real do status operacional do robô
Ferramenta de linha de comando de página da Web
Múltiplas funções para expansão mais fácil
Rápido de configurar, fácil de expandir
Personalize e adicione facilmente novas funções sem modificar o código frontal
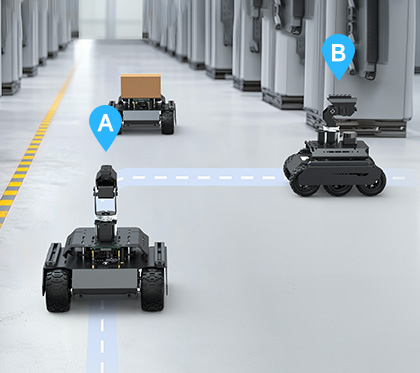
ESP-NOW Comunicação sem fio
entre robôs
Baseados no protocolo de comunicação ESP-NOW, vários robôs podem se comunicar entre si sem endereço IP ou MAC, alcançando colaboração de vários dispositivos com comunicação de baixa latência de 100 microssegundos
Controle de gamepad para melhor operação Experiência
Vem com um gamepad sem fio, tornando o controle do robô mais flexível.Você pode conectar o receptor USB ao seu PC e controlar o robô remotamente via Internet.Fornece demonstração de código aberto para personalizar seu próprio método de interação
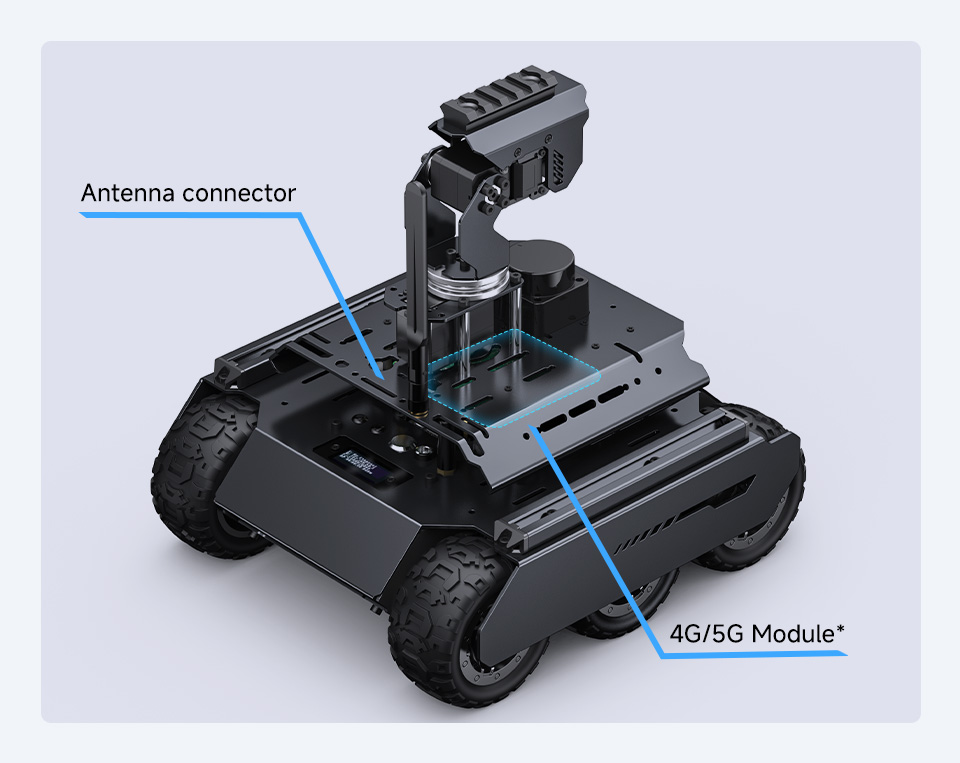
Suporta expansão 4G/5G
Suporta instalação de módulo 4G/5G* para cenários de aplicação sem WiFi
* Pode ser necessário usar o serviço de túnel como Ngrok, Cpolar ou LocalTunnel para expor o serviço de rede local do robô (aplicação Flask) à Internet para que você possa controlar o robô de qualquer lugar.
realiza controle remoto pela internet
Nossas demonstrações de aplicativos web são baseadas no WebRTC para transmissão de vídeo em tempo real.
WebRTC (Web Real-Time Communications) é uma tecnologia que permite que aplicações e sites da web estabeleçam conexão peer-to-peer e capturem opcionalmente streaming de mídia de áudio e/ou vídeo, bem como troque dados arbitrários entre navegadores sem a necessidade de um intermediário.
Fornecemos tutoriais abrangentes Ngrok* para ajudá-lo a começar rapidamente e realizar o controle do robô pela Internet.
* Fornece apenas tutoriais de uso de Ngrok, não fornecemos contas ou servidores Ngrok.Você pode seguir nosso tutorial para abrir seu próprio serviço Ngrok ou escolher outros serviços de túneamento de acordo com suas necessidades.
Suporta instalação de suporte para smartphone
Se você tiver um telefone sobressalente, poderá instalá-lo no robô através do suporte conforme abaixo, usando o telefone para criar um ponto de acesso para o robô e obter controle remoto pela Internet por um custo menor
* Vem com um suporte para smartphone com parafuso de 1/4′′ na embalagem
Tutorial interativo multiplataforma
Desenvolva enquanto você aprende
suporta o acesso a Júpyter Lab por meio de dispositivos como telefones celulares e tablets para ler os tutoriais e editar o código na página da web, facilitando o desenvolvimento
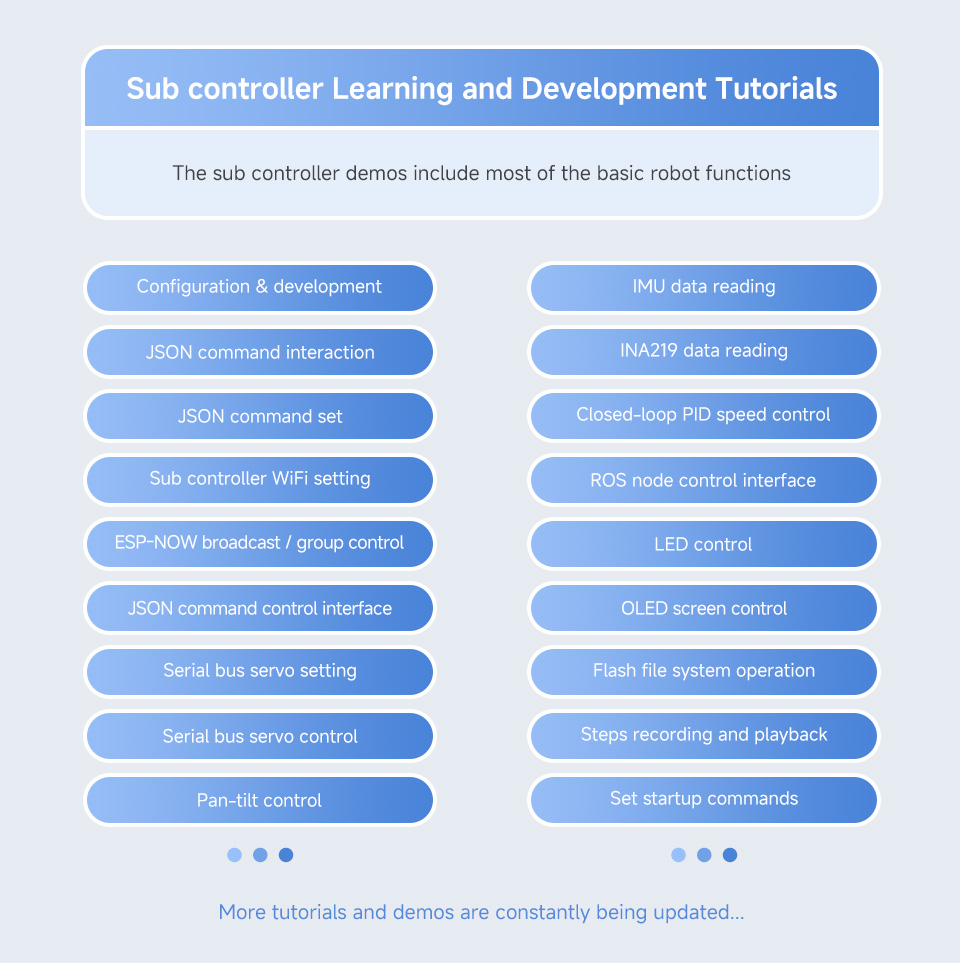
Recursos tutoriais ricos
Fornecemos tutoriais e demonstrações completos para ajudar os usuários a começar rapidamente para aprendizagem e desenvolvimento secundário
Open source todas as demonstrações
Pilha completa de tecnologia de controlador duplo


















































Avaliações
Ainda não existem avaliações.