UGV Beast Open-Source Off-Road Tracked AI Robot, controladores duplos, flexível e expansível, todo em metal corpo, visão computacional, adequado para Raspberry Pi 4B / Raspberry Pi 5

Características Num relance
O Besta UGV É um robô AI projetado para exploração e criação com grande potencial de expansão. Ele conecta perfeitamente sua imaginação à realidade, adequado para entusiastas de tecnologia, fabricantes ou iniciantes em programação, é sua escolha ideal para explorar o mundo da tecnologia inteligente.
Equipado com o computador Raspberry Pi de alto desempenho para lidar com estratégias e funções complexas enquanto inspira sua criatividade. Adota o design de controlador duplo, combina as funções AI de alto nível do controlador host com as operações básicas de alta frequência do subcontrolador, garantindo que todas as operações sejam precisas e suaves.
Você pode facilmente controlá-lo remotamente através do UGV Beast Web Application sem baixar nenhum software, basta abrir seu navegador e iniciar sua jornada. Suporta transmissão de vídeo em tempo real de alta taxa de quadros e múltiplas funções AI Computer Vision, o UGV Beast é uma plataforma ideal para realizar suas ideias e criatividade!
Seleção do Kit
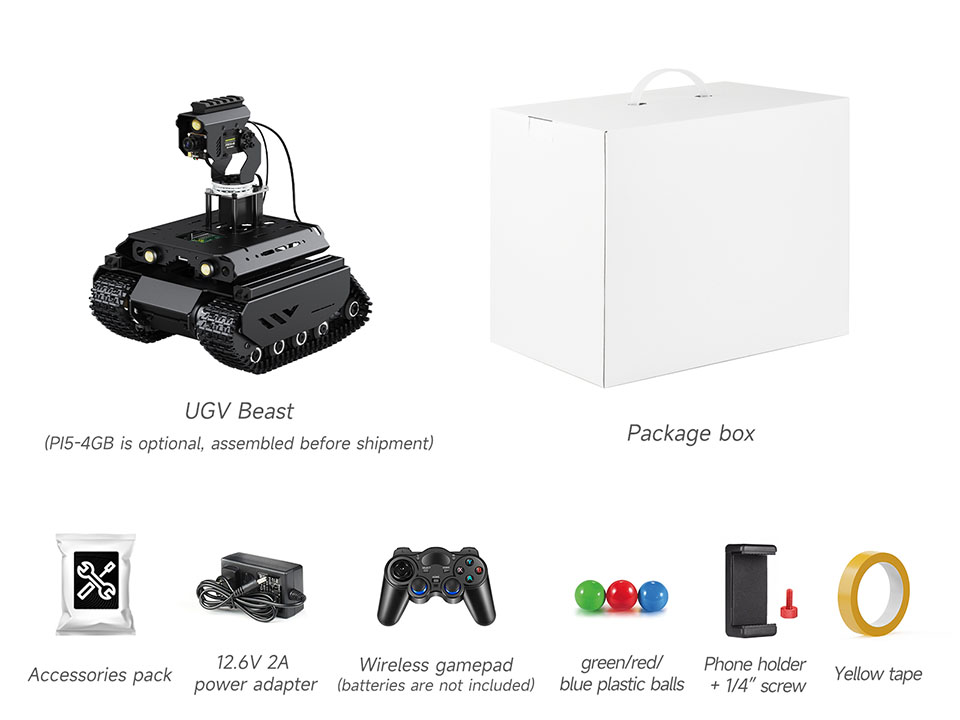
Módulo Pan-Tilt opcional (versão PT apenas) para melhor expansão potencial. Opções para controlador host (Raspberry Pi 4B / Raspberry Pi 5), ou você pode escolher a versão Acce se você tem um Pi. Todos os kits são equipados com câmera, acessórios de montagem, cartão TF, ventilador de refrigeração, etc.
MODELO |
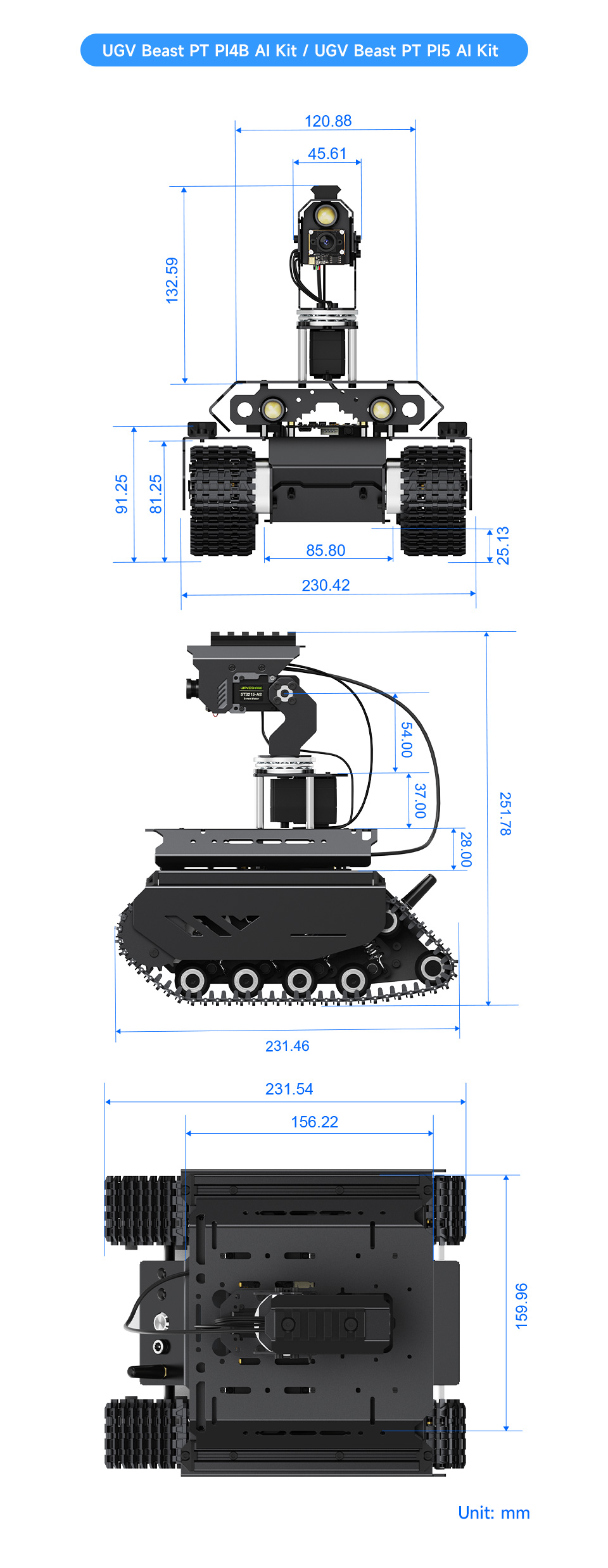
UGV Beast PT Kit PI4B/PI5 AI |
UGV Besta PT PI4B/PI5 AI Kit Acce |
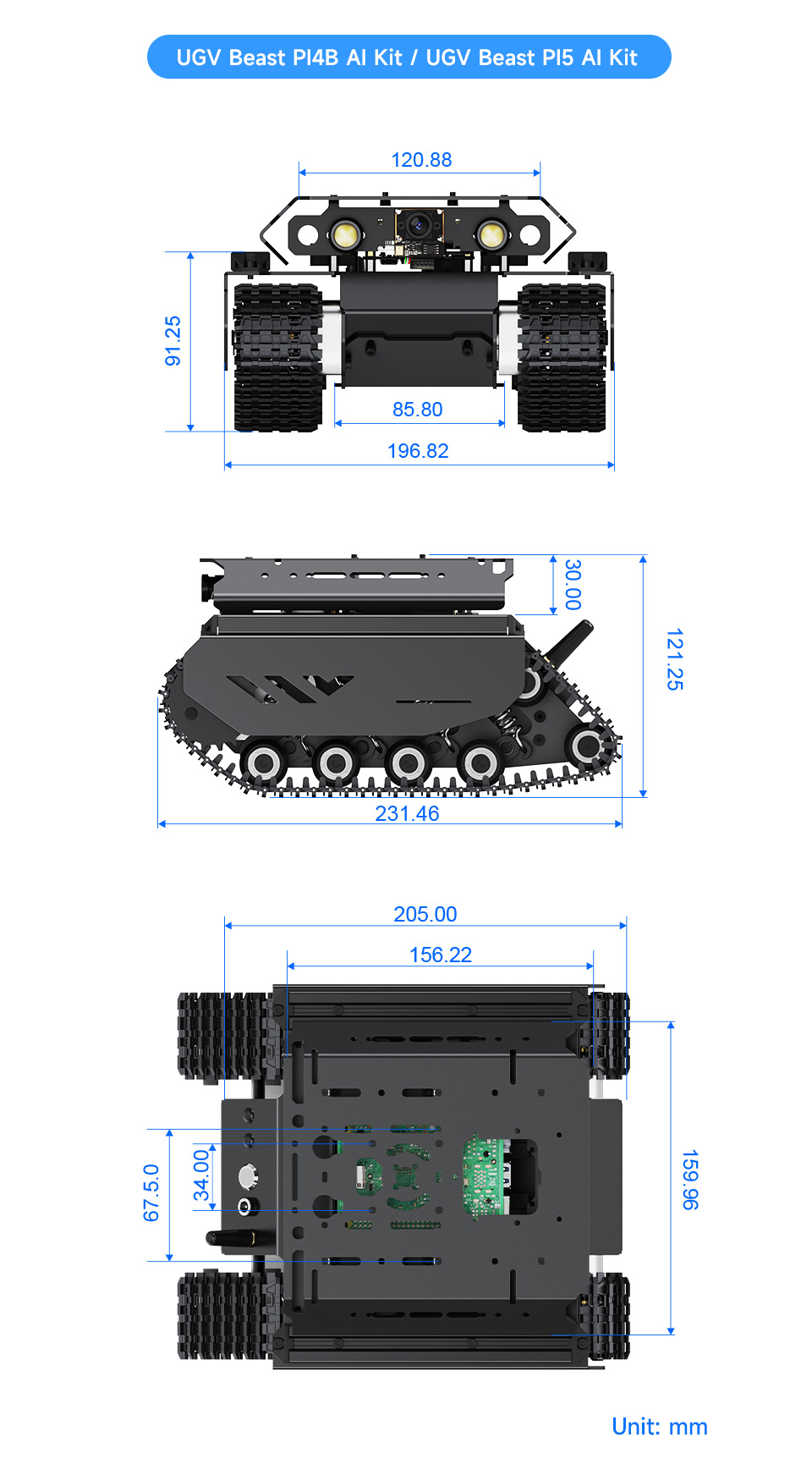
UGV Besta Kit PI4B/PI5 AI |
UGV besta PI4B/PI5 AI Kit Acce |
|
|
|
|
DIMENSÃO |
232 × 197 × 252 milímetros |
232 × 197 × 122 milímetros |
PESO |
2350 ± 5g |
2034 ± 5g |
ALTURA DE CHASSE |
26 milímetros |
PAN-TILT DOF |
2 |
- |
TORQUE DE SERVO PAN-TILT |
30KGCM |
- |
PAN-INCLINAÇÃO SERVO |
Servo ST3215 |
- |
CONTROLADOR DE HOSTES |
RPi 4B 4GB / RPi 5 4GB |
Não incluído |
RPi 4B 4GB / RPi 5 4GB |
Não incluído |
APOIO A SISTEMA DE HOSTES |
Bookwrom Debian |
VERSÃO ROS2 |
ROS2-HUMBLE-LTS |
CÂMERA FOV |
160° |
Fonte de energia |
Módulo 3S UPS |
APOIO À BATERIA |
18650 lítio bateria x 3 (NÃO incluído) |
MÉTODOS DE CONTROLE DEMO |
Aplicação Web/Programação interativa do Jupyter Lab |
VELOCIDADE MAX DEFAULT |
0,35 m/s |
NÚMERO DE RODAS DE CONDUÇÃO |
2 |
MATERIAL DE SUSPENSÃO |
Aço inoxidável |
LARGURA DE PISTA |
40 milímetros |
RÁDIO MÍNIMO DE VOLTA |
0M (rotação in situ) |
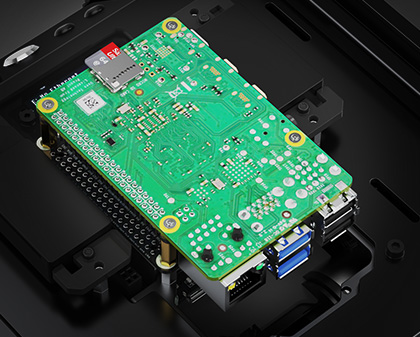
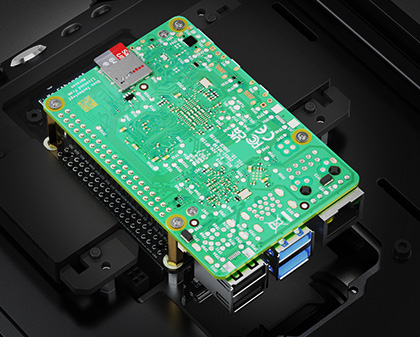
Baseado Em Raspberry Pi
Suporta Raspberry Pi 5 / Raspberry Pi 4B, Oferecendo poderoso desempenho computacional para mais possibilidades
Conexão com Raspberry Pi 4B
Conexão com Raspberry Pi 5
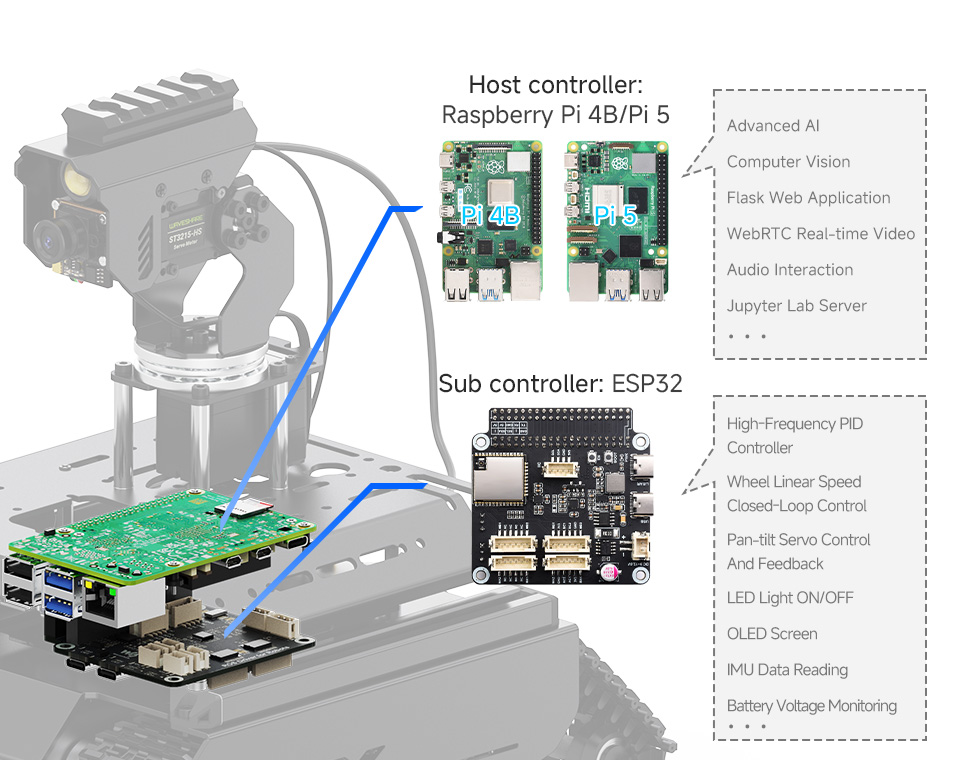
Design de controlador duplo, fornece colaboração eficiente e desempenho atualizado
O Controlador Host Adota Raspberry Pi Para Visão E Planejamento De Estratégia AI, E O Sub Controlador Usa ESP32 Para Controle De Movimento E Processamento De Dados Do Sensor
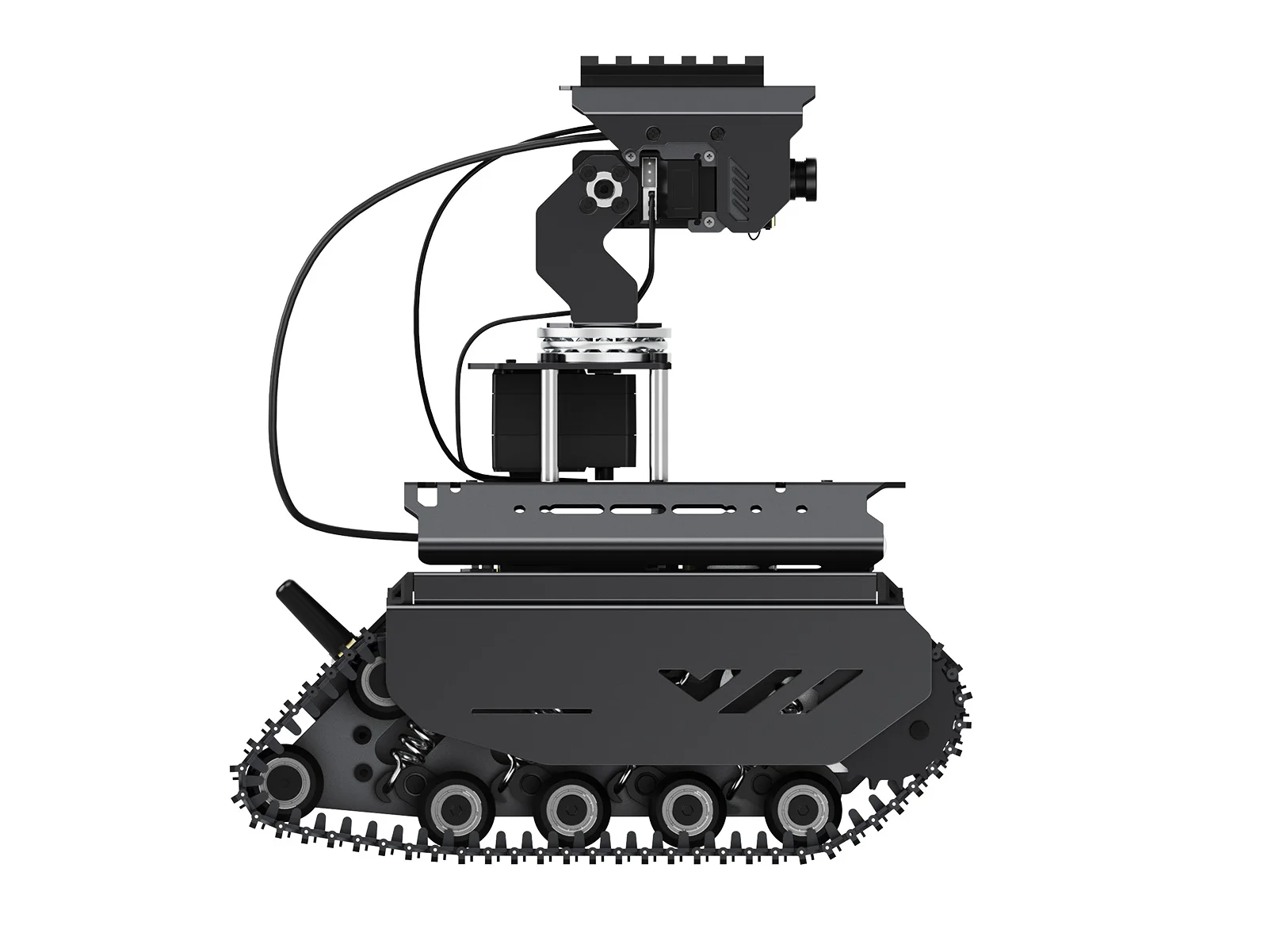
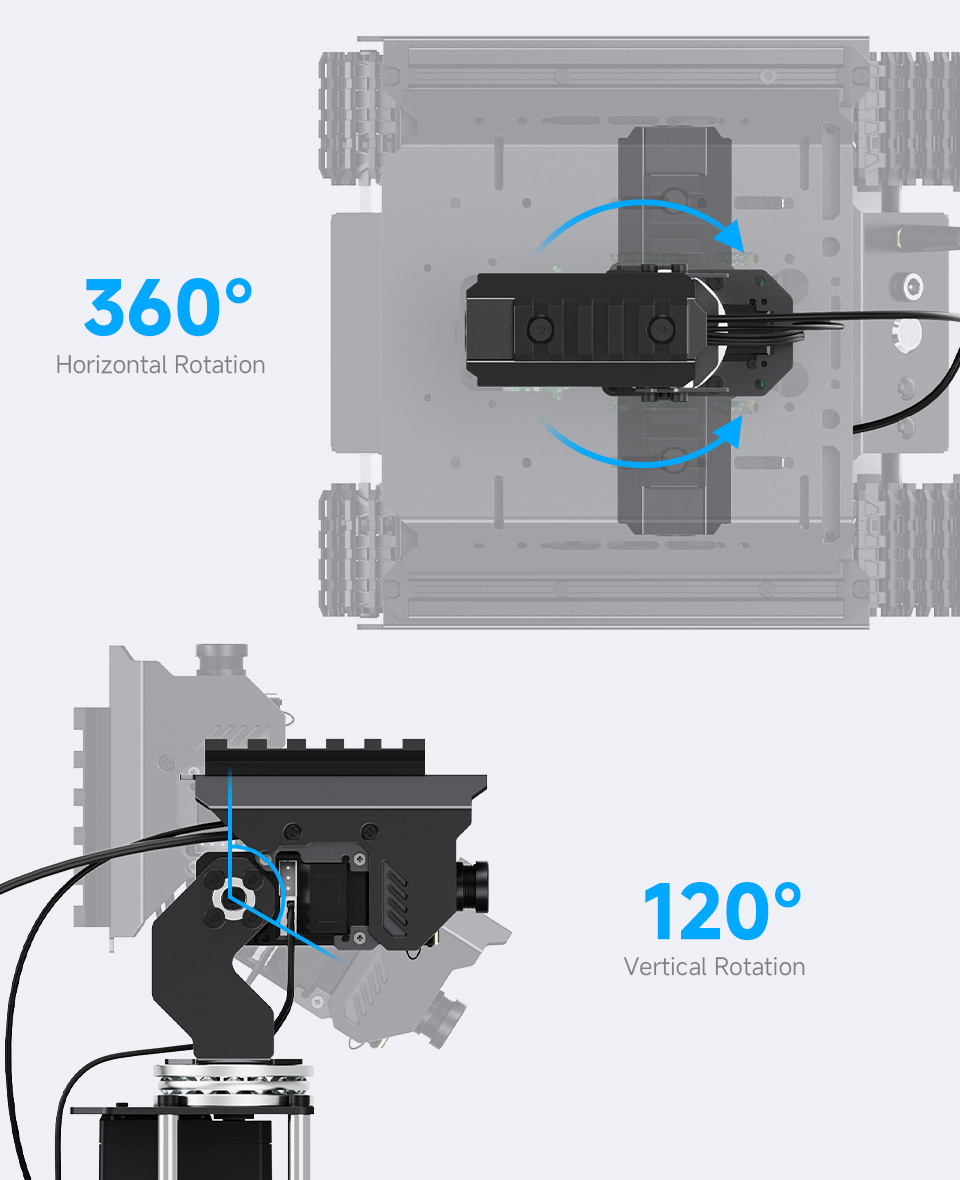
Pan-Tilt omnidirecional flexível 360 °
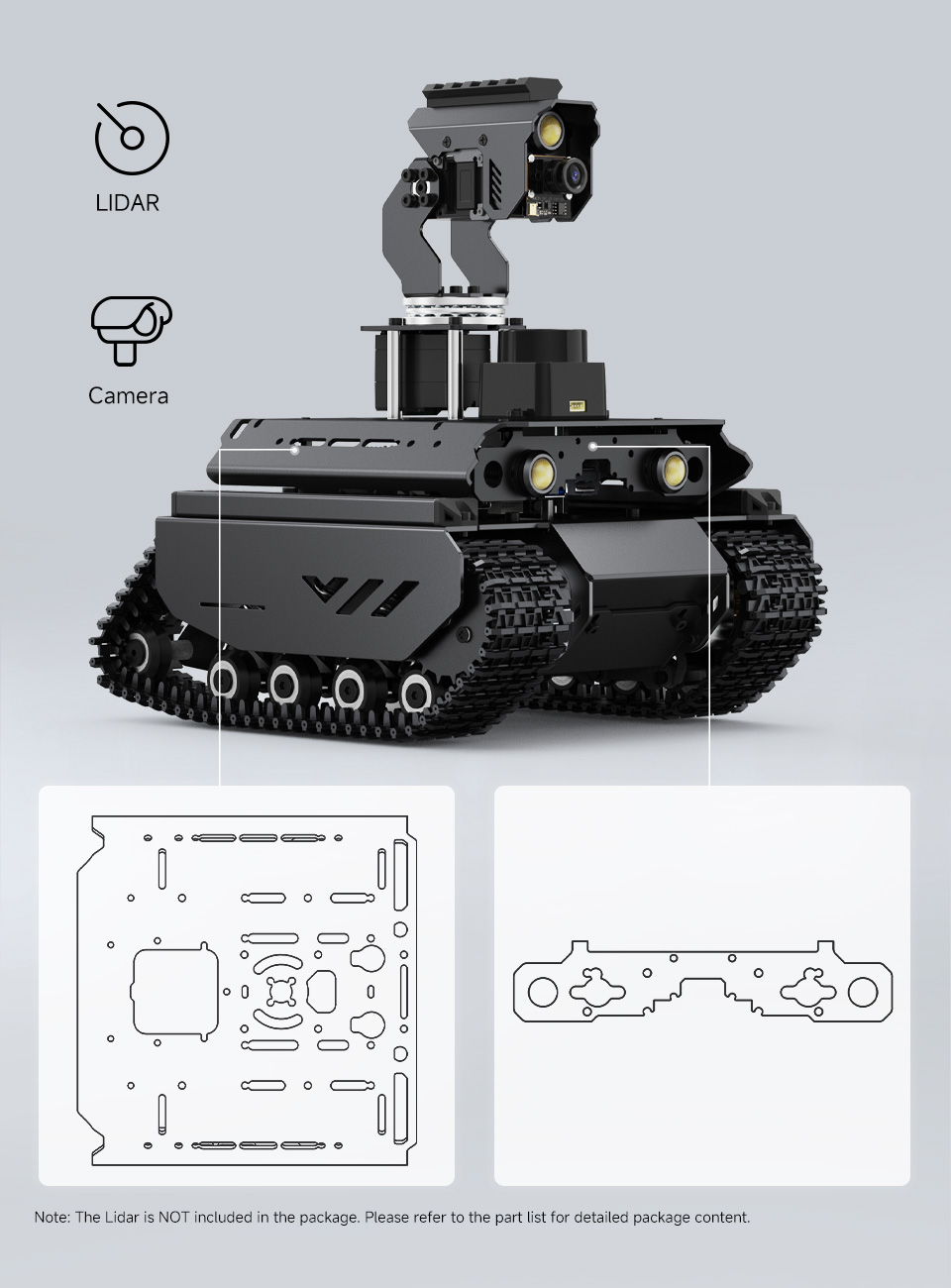
Equipado com a câmera larga do ângulo de 5MP 160 ° para capturar cada detalhe
Suporta controle de arrastar e soltar Pan-Tilt via mouse ou painel de toque do laptop, proporcionando uma melhor experiência de controle como jogos FPS
Continuando a aventura como a noite cai, suporta extensão tática
Luz LED de alto brilho para garantir imagens claras em condições de pouca luz
Vem com 21mm trilho largo e 30KG.CM alta precisão & servo ônibus de alto torque para extensão tática
Para a referência somente, os acessórios na imagem acima não são incluídos
Trilho alumínio padrão
Vem com 2 × 1020 Trilhos de perfil padrão europeu e suporta a instalação de periféricos adicionais através das porcas do barco para atender às diferentes necessidades, expandindo facilmente os cenários de operação especial
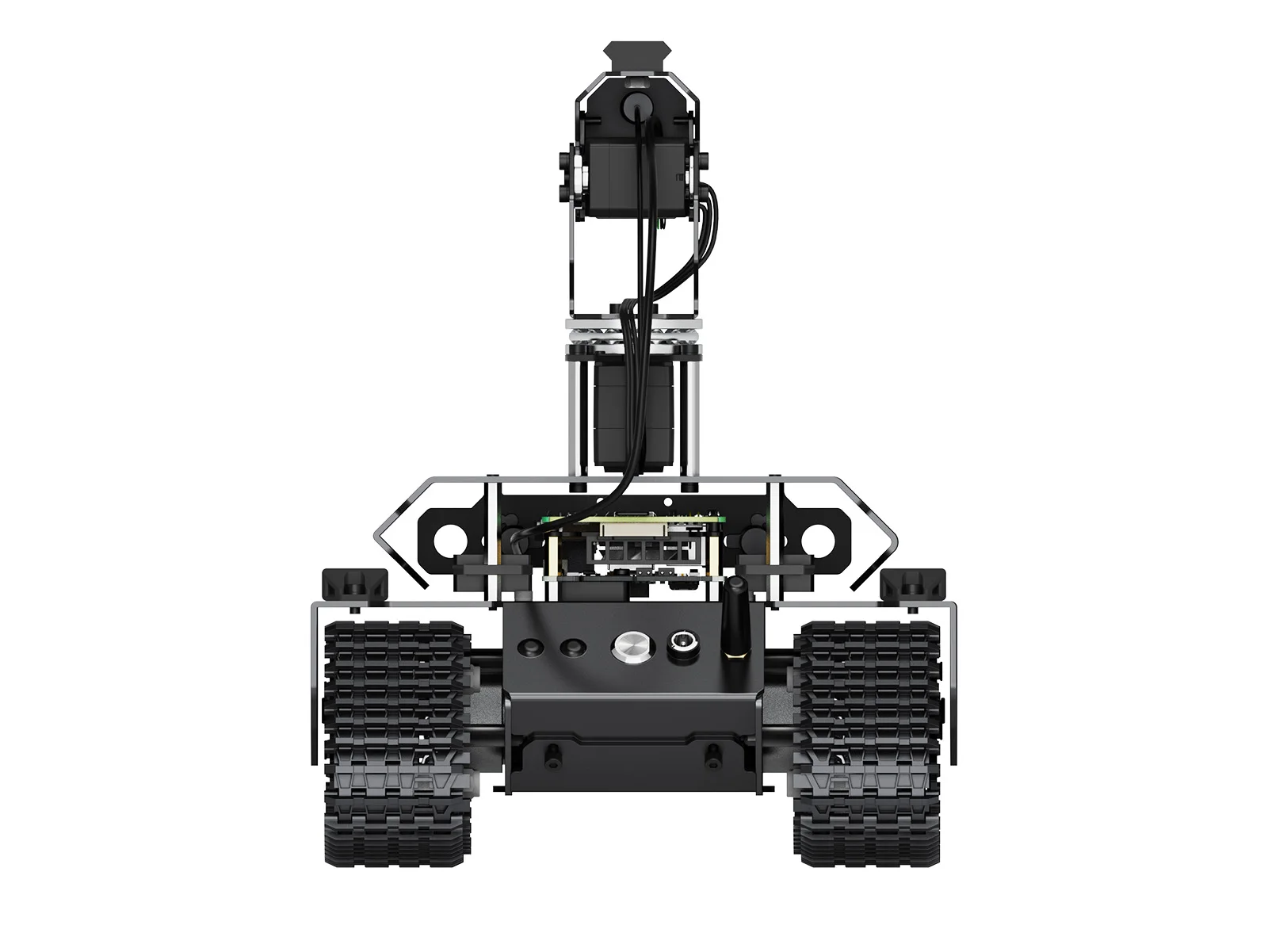
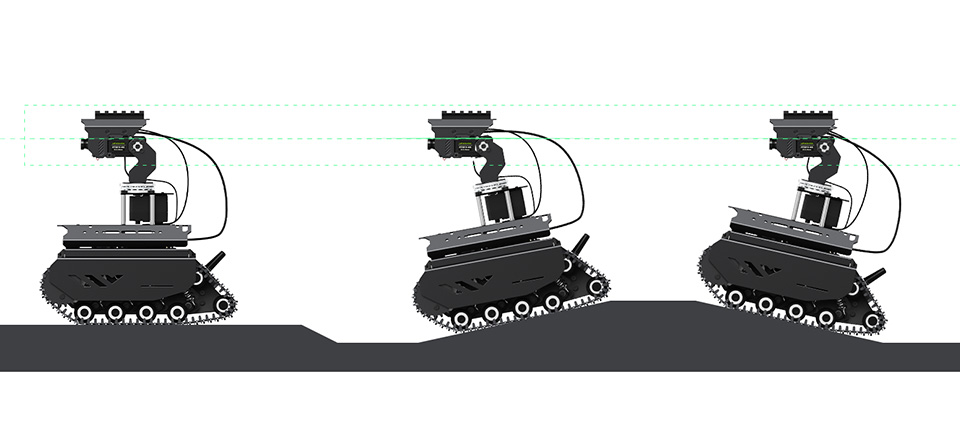
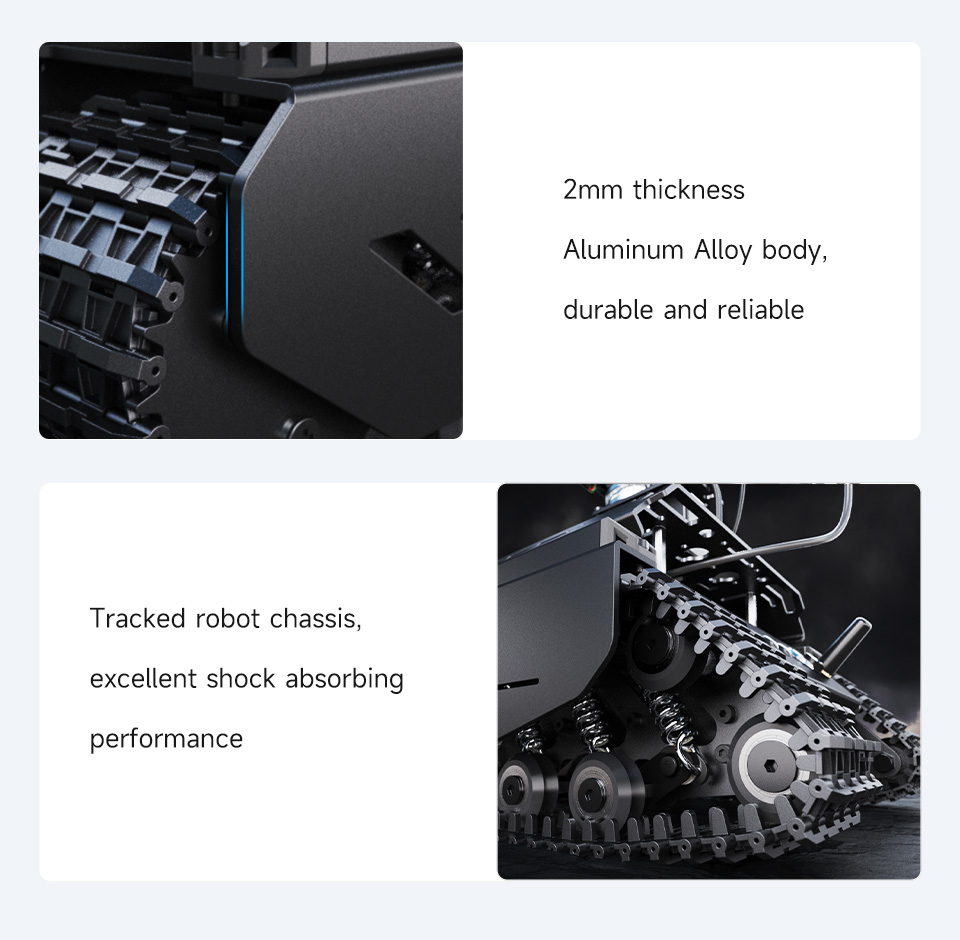
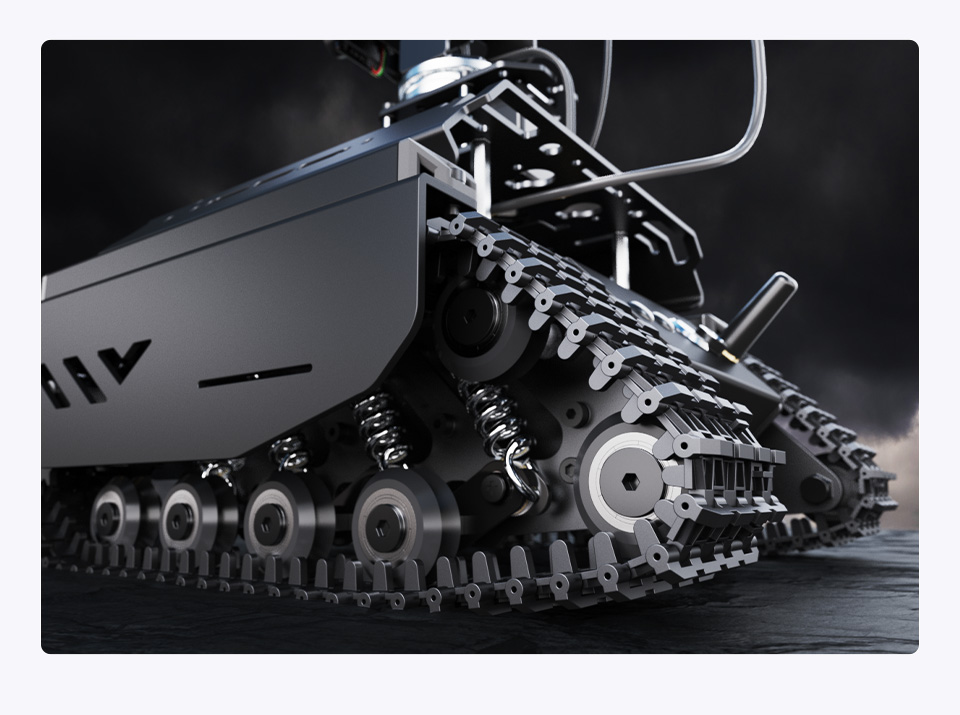
Suporta a condução em terreno complexo
Adota o chassi móvel rastreado do robô com sistemas de suspensão independentes para a capacidade mais estável do cruzamento fora de estrada
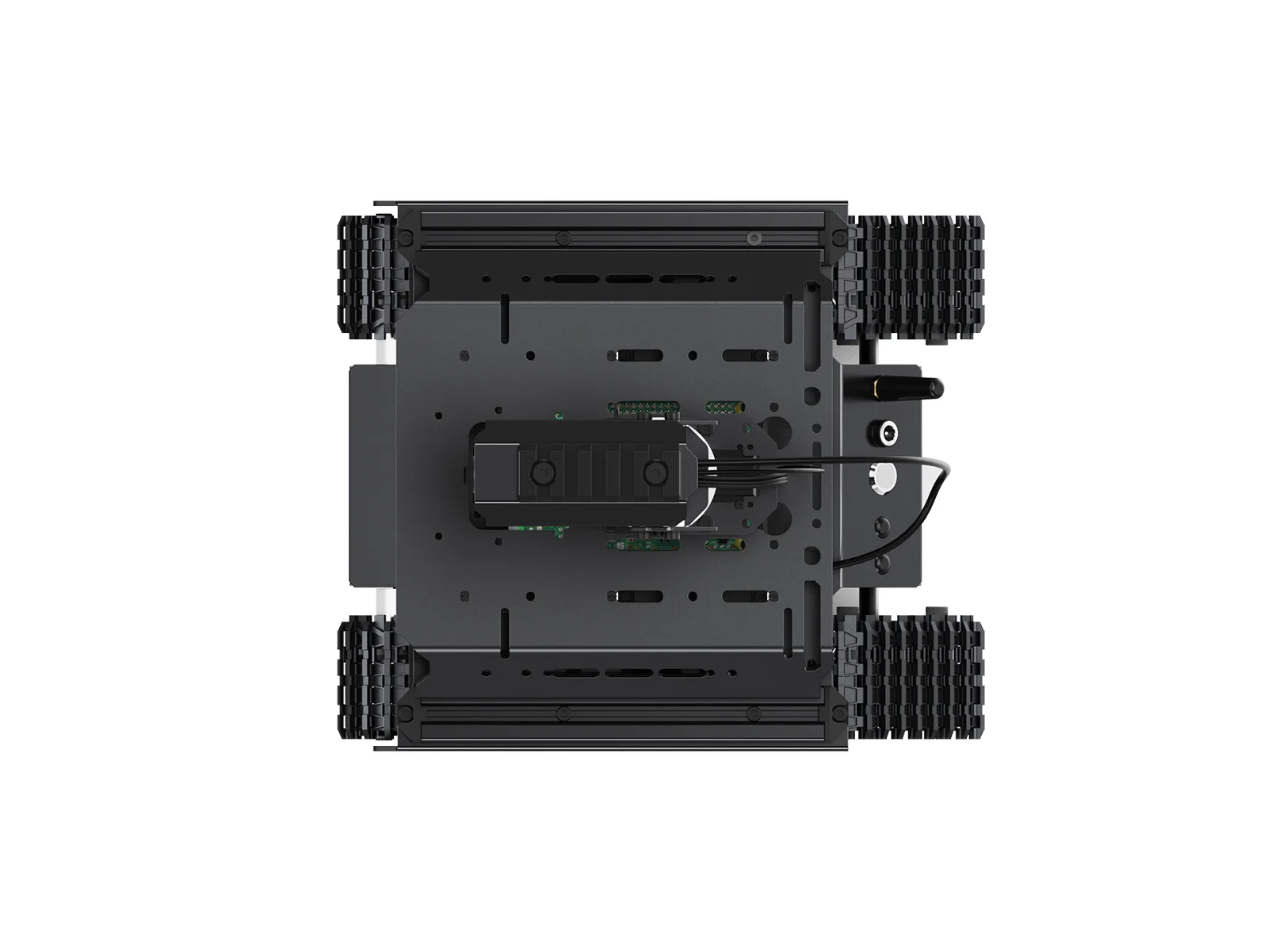
Vem com um multi-funcional
Placa montagem
Pode ser usado para instalar uma variedade de periféricos, incluindo D500 Lidar, STL-27L Lidar, câmera ou outros módulos. Open Source para desenho DXF e modelo 3D, que é mais conveniente para o desenvolvimento secundário.
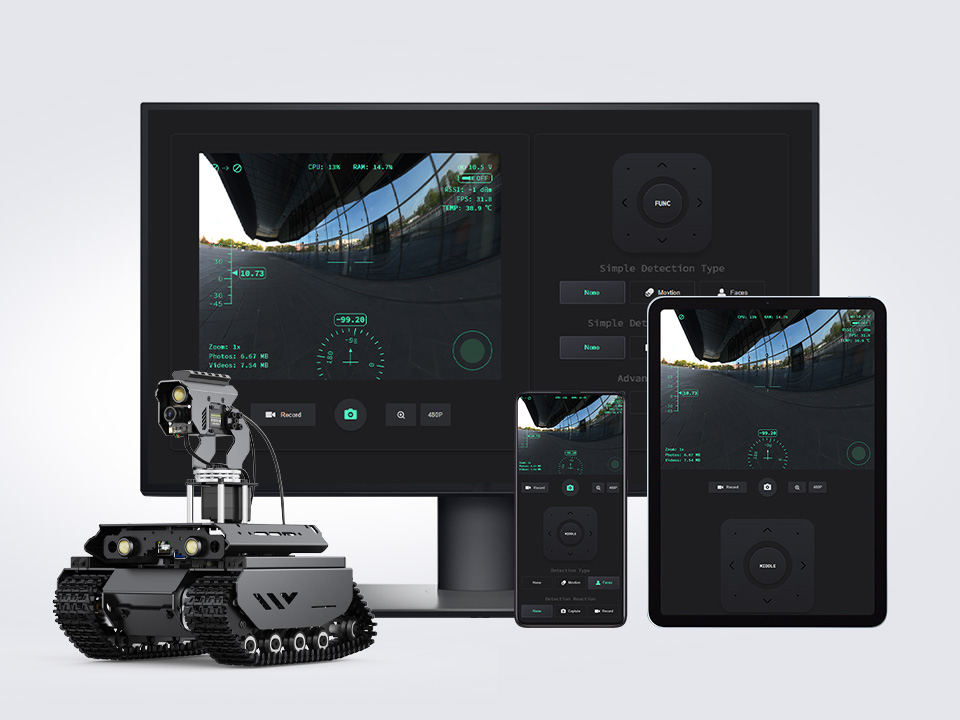
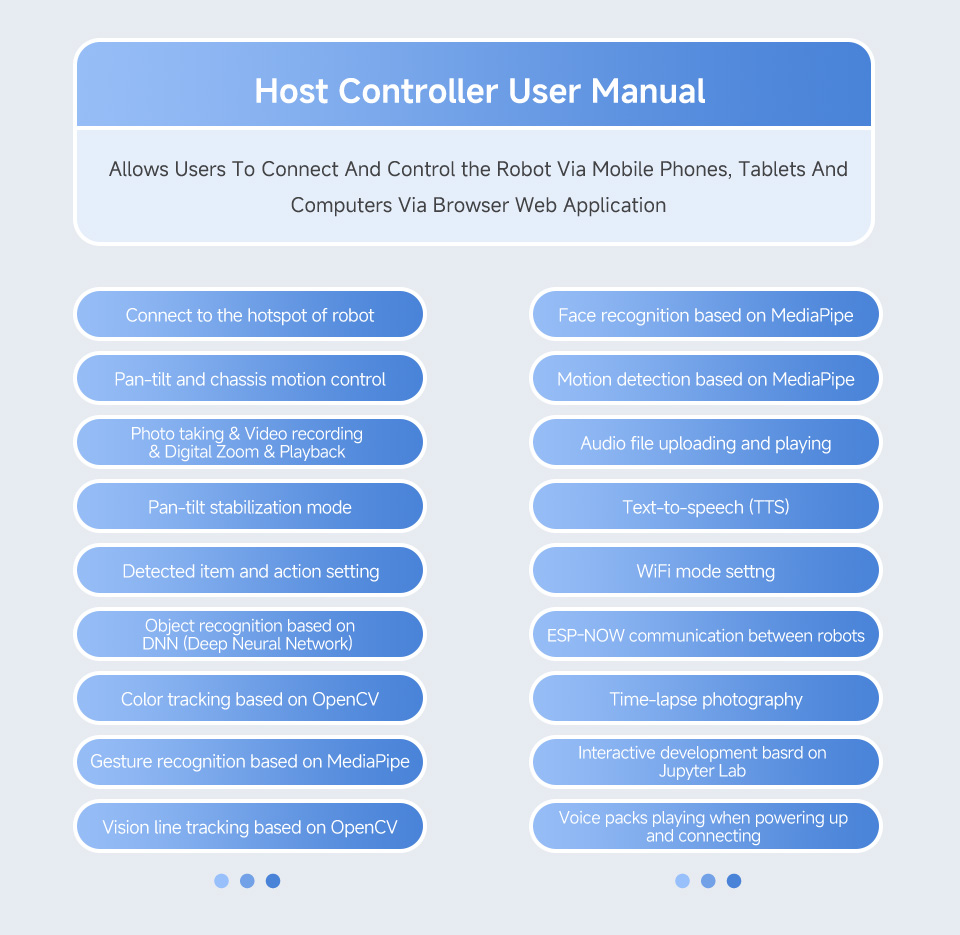
Fácil de controlar Via
Aplicação Web Cross-Platform
Nenhuma instalação do aplicativo necessária, permite que os usuários conectem e controlem o robô por telefones celulares, tablets e computadores via navegador Web App. Suporta controle de tecla atalho como WASD e Mouse Control ao usar um PC com teclado
Transmissão Wireless em tempo real WebRTC
Adota Flask Lightweight Web Application, baseado em WebRTC Ultra-Low Latency Real-Time Transmission, usando linguagem Python e fácil de estender, trabalhando perfeitamente com OpenCV
Reconhecimento, rastreamento e segmentação
Baseado em OpenCV para alcançar o reconhecimento cor e segmentação automática. Suporta One-Key Pan-Tilt Control e iluminação LED automática, permite a expansão para mais funções
Detecção facial:
Imagem automática ou captura video
Baseado no OpenCV para alcançar o reconhecimento facial, suporta foto automática ou gravação de vídeo uma vez que um rosto é reconhecido
Reconhecimento Inteligente Objeto
Suporta reconhecimento para muitos objetos comuns com o modelo padrão
Reconhecimento do gesto:
Interação AI com linguagem corporal
Combina OpenCV e MediaPipe para realizar o controle gesto de Pan-Tilt e LED
Controle do gesto para tirar fotos
LED ON/OFF e controle blacklight
Mais MediaPipe Demos para criar facilmente
Tarefas complexas do processamento video
O MediaPipe é uma estrutura de código aberto desenvolvida pelo Google para criar pipelines de processamento multimídia multiplataforma, fornece um conjunto de componentes e ferramentas pré-construídos. sua capacidade de processamento de alto desempenho permite que o robô responda e processe entradas multimídia complexas, como análise de vídeo em tempo real.
Vision Line Tracking para condução autônoma
Integrado com a função Vision Line Tracking no Computer Vision Demo, vem com fita amarela para facilitar o planejamento do caminho. Usuários podem entender os algoritmos básicos da condução autônoma com esta demonstração simples
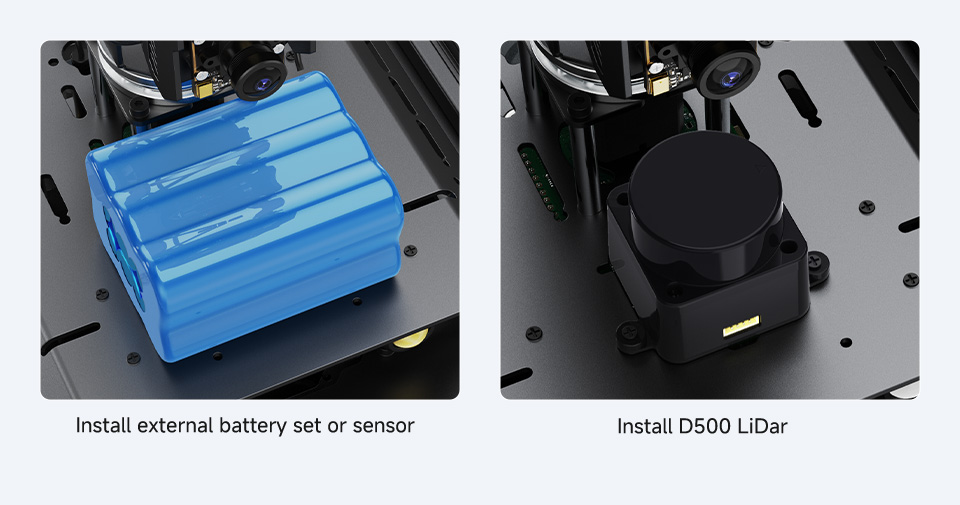
Espaço reservado para expandir periféricos
Espaço reservado na placa de montagem com furos M2.5 da montagem, para instalar D500 / STL27L LIDAR ou outros periféricos
* Vem com parafusos e cabos para instalar o D500 LIDAR, Por favor, consulte WIKI Para mais detalhes. O D500 LIDAR e o conjunto de baterias NÃO estão incluídos.
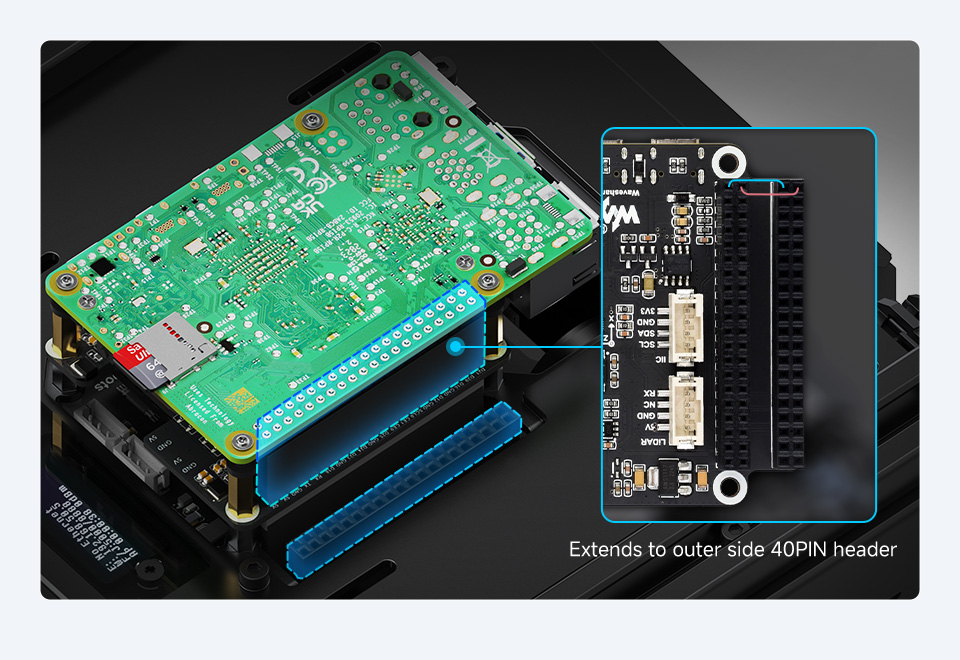
40PIN GPIO cabeçalho estendido
O robô ocupa apenas a interface URAT do Raspberry Pi GPIO para comunicação, adaptando o cabeçalho 40PIN do lado externo na placa de driver para expandir mais periféricos e funções
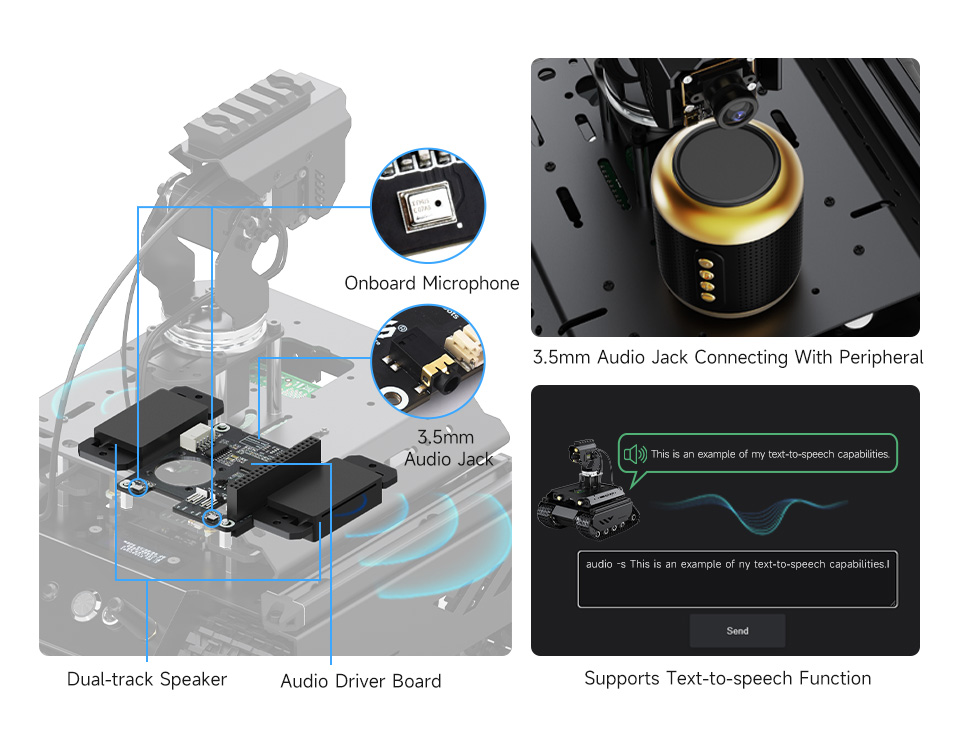
Múltiplos métodos áudio interação
Equipado com Audio Driver Board, Dual-Track Speaker, e microfone de bordo, construído em 3.5mm Audio Jack para conectar periféricos para alcançar Text-to-Speech e áudio jogando
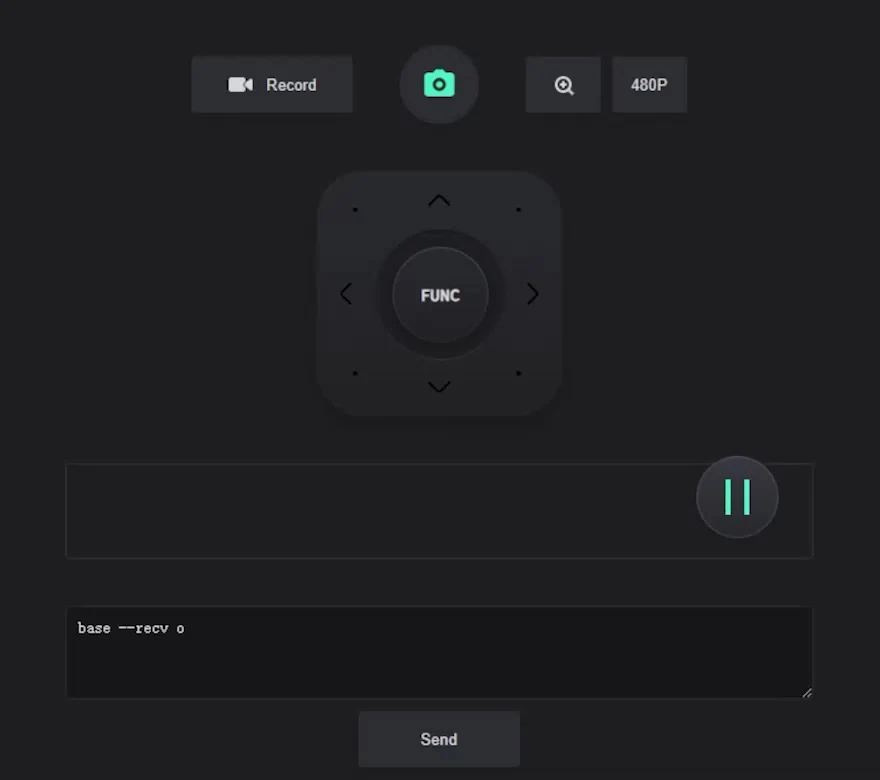
Obtém informações em tempo real Feedback
Monitoramento em tempo real do status operacional do robô
Página Web Command Line Tool
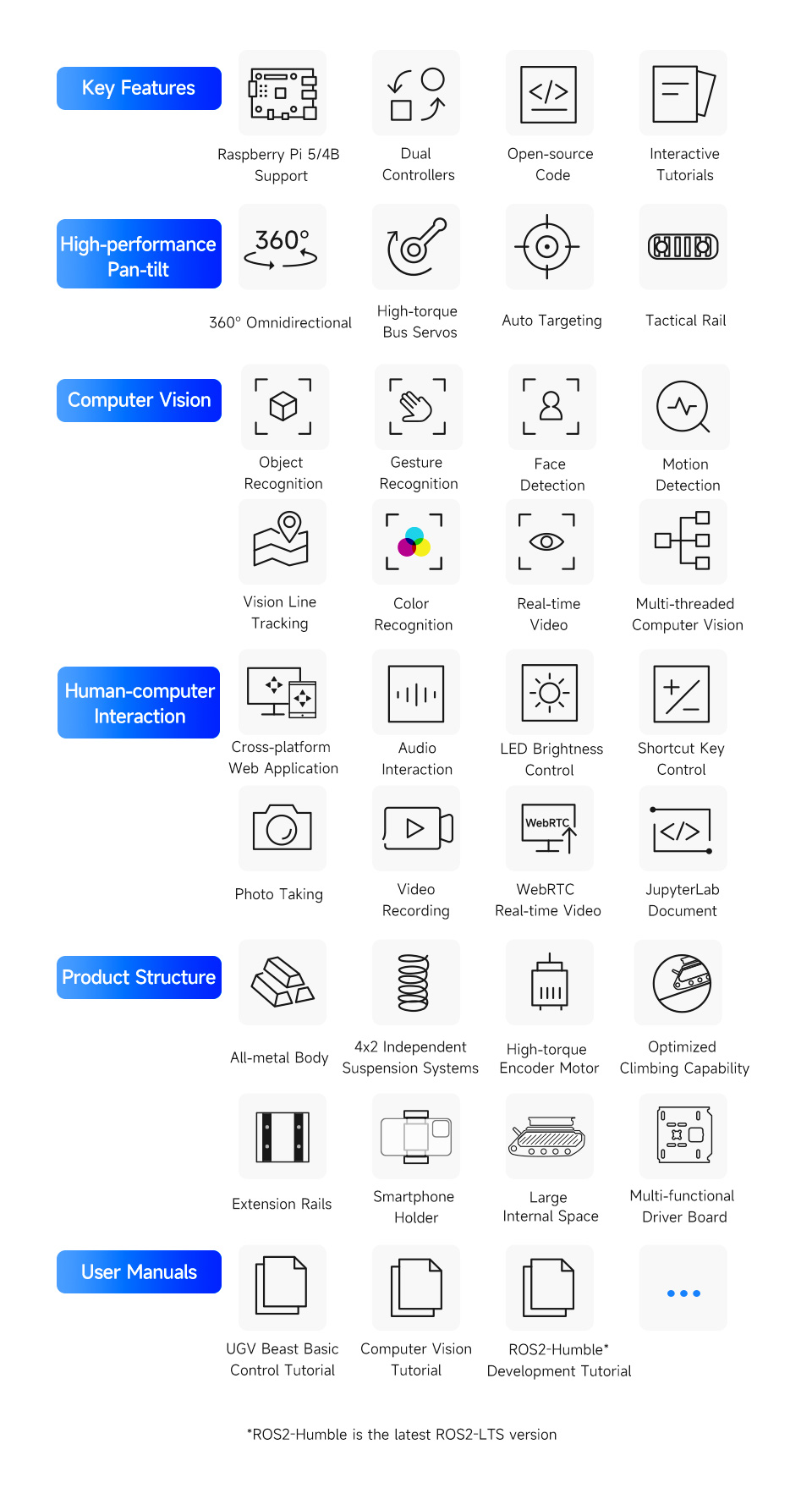
Múltiplas funções para fácil expansão
Rápido para configurar, fácil de expandir
Personalize e adicione facilmente novas funções sem modificar o código front-end
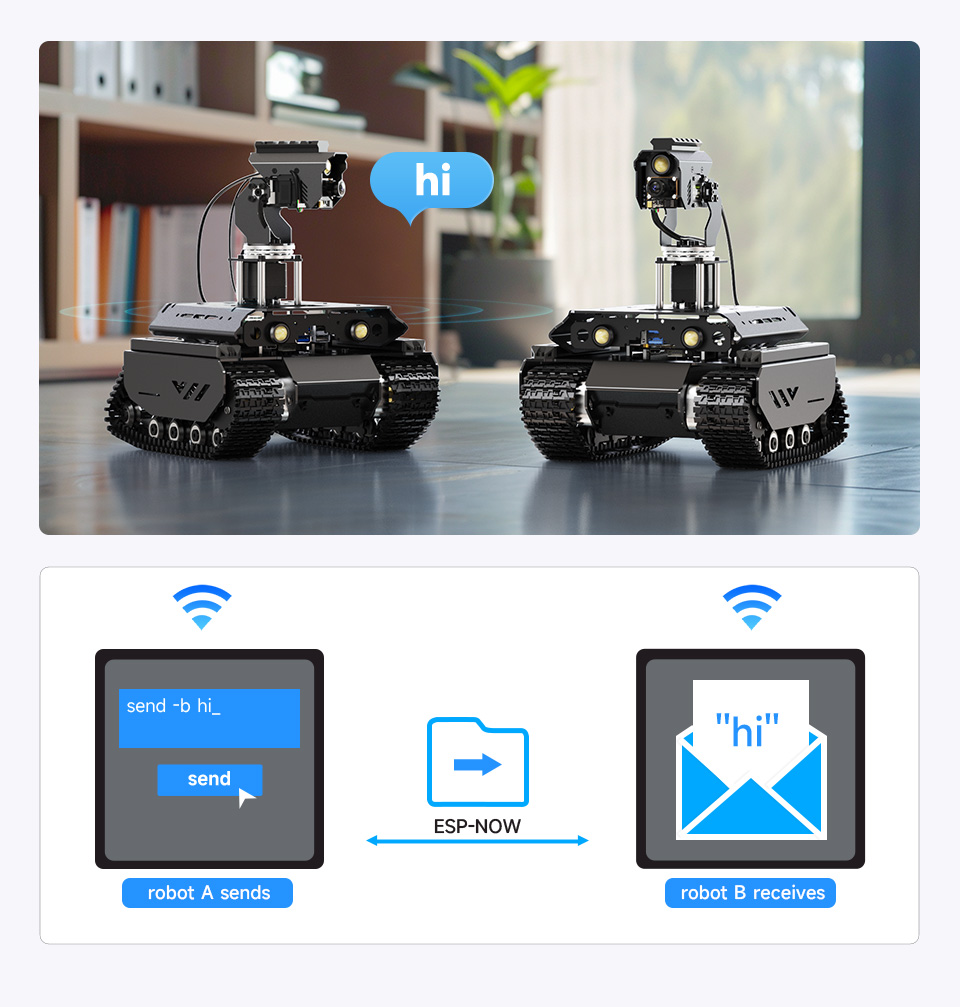
ESP-NOW Comunicação Wireless
Entre robôs
Com base no protocolo ESP-NOW Communication, vários robôs podem estabelecer comunicação sem endereços IP ou MAC, conseguindo colaboração em vários dispositivos com comunicação de baixa latência de 100 microssegundos
Suporta Pan-Tilt Vertical Estabilização Função para várias condições rodoviárias
Suporta a função de estabilização baseada no sensor IMU para manter a imagem estável. Realiza IMU Data Reading, Cálculo e Pan-Tilt Control Via Sub controlador, que não vai ocupar recursos de computação do host
Controle Gamepad Para Melhor Experiência De Operação
Vem com um gamepad sem fio, tornando o controle do robô mais flexível. Você pode conectar o receptor USB ao seu PC e controlar o robô remotamente através da Internet. Fornece Open Source Demo para personalizar seu próprio método interação
Suporta expansão 4G/5G
Suporta instalação 4G/5G Module * Para os cenários de aplicação sem WiFi
* Você pode precisar usar o Serviço de Túnel, como Ngrok, Cpolar ou LocalTunnel para expor o serviço de rede local do robô (aplicativo Flask) para a Internet para que você possa controlar o robô de qualquer lugar.
Suporta controle remoto através da Internet
Nossas demonstrações de aplicações web são baseadas em WebRTC para transmissão de vídeo em tempo real.
WebRTC (Web Real-Time Communications) é uma tecnologia que permite que aplicativos e sites da Web estabeleçam conexões peer-to-peer e capturem opcionalmente mídias de áudio e/ou vídeo, bem como para trocar dados arbitrários entre navegadores sem exigir um intermediário.
Nós fornecemos tutoriais abrangentes Ngrok * para ajudá-lo a começar rapidamente e realizar o controle do robô através da internet.
* Fornece os tutoriais de uso de Ngrok apenas, nós não fornecemos quaisquer contas Ngrok ou servidores. Você pode seguir nosso tutorial para abrir seu próprio serviço Ngrok ou escolher outros serviços de tunelamento de acordo com suas necessidades.
Suporta Instalação Smartphone Titular
Se você tem um telefone sobressalente, você pode instalá-lo no robô através do suporte como abaixo, usando o telefone para criar um hotspot para o robô e alcançar o controle remoto através da Internet a um custo menor
* Vem com um suporte de smartphone com 1/4 ″ parafuso na embalagem
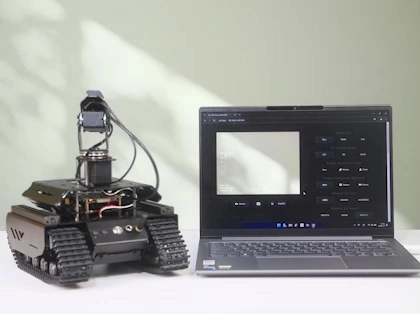
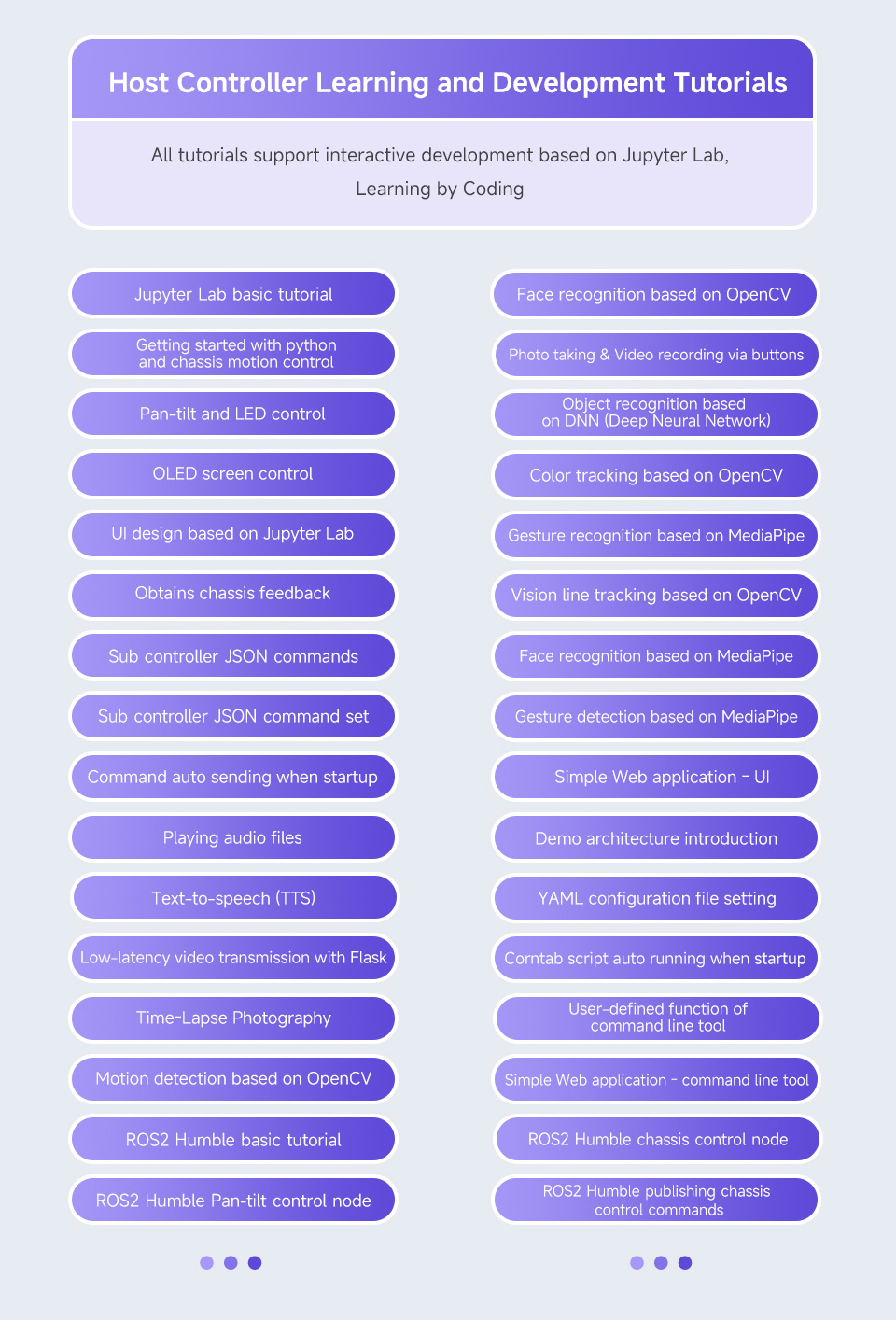
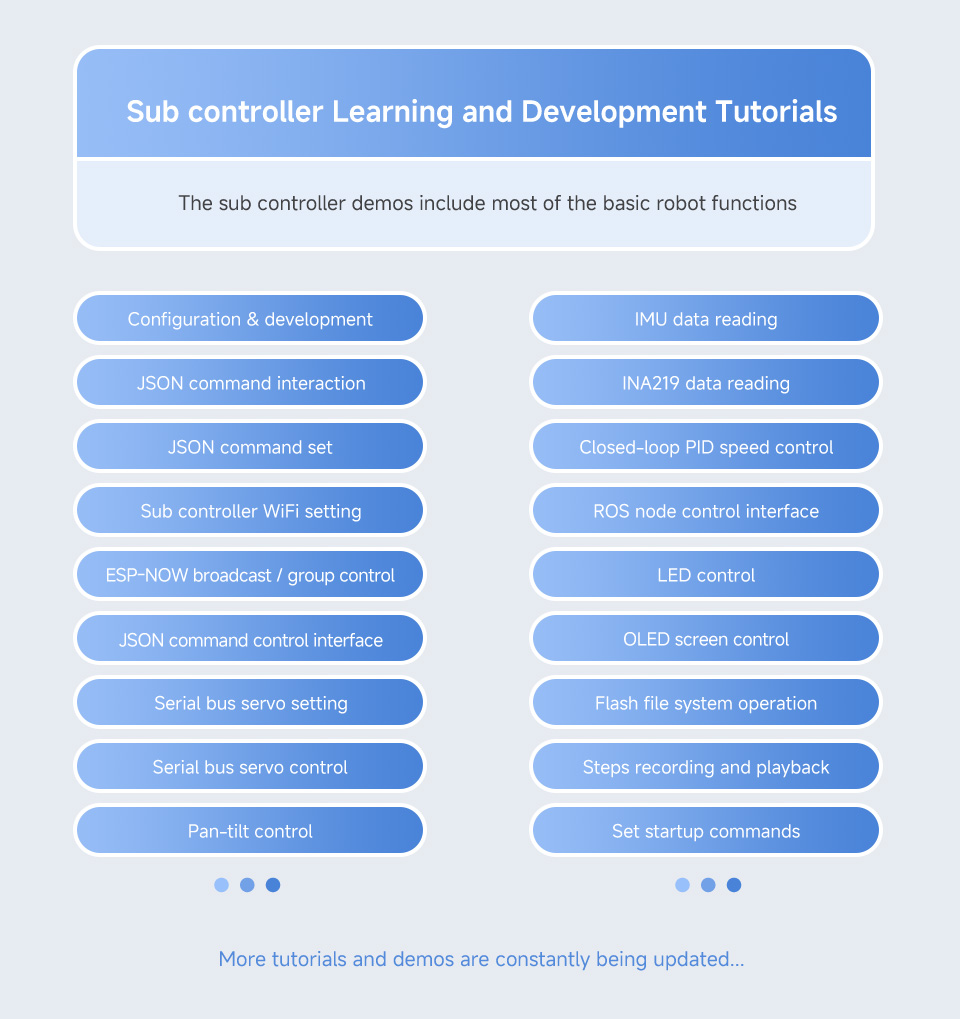
Tutorial interativo Cross-Platform
Desenvolva enquanto você aprende
Suporta Acessar o Jupyter Lab Via Dispositivos Como Celulares E Tablets Para Ler Os Tutoriais E Editar O Código Na Página Da Web, Facilitando O Desenvolvimento
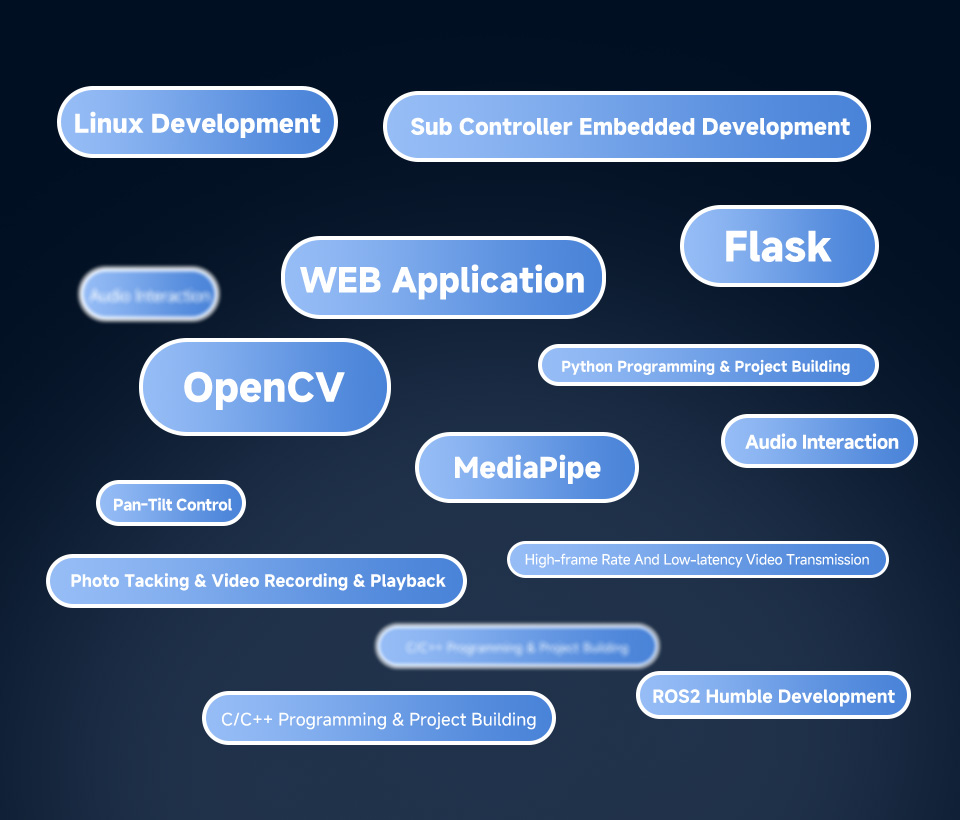
Recursos ricos do tutorial
Fornecemos tutoriais e demonstrações completas para ajudar os usuários a iniciarem rapidamente o aprendizado e o desenvolvimento secundário
Open-Source Todas as Demos
Pilha completa de tecnologia de controlador duplo
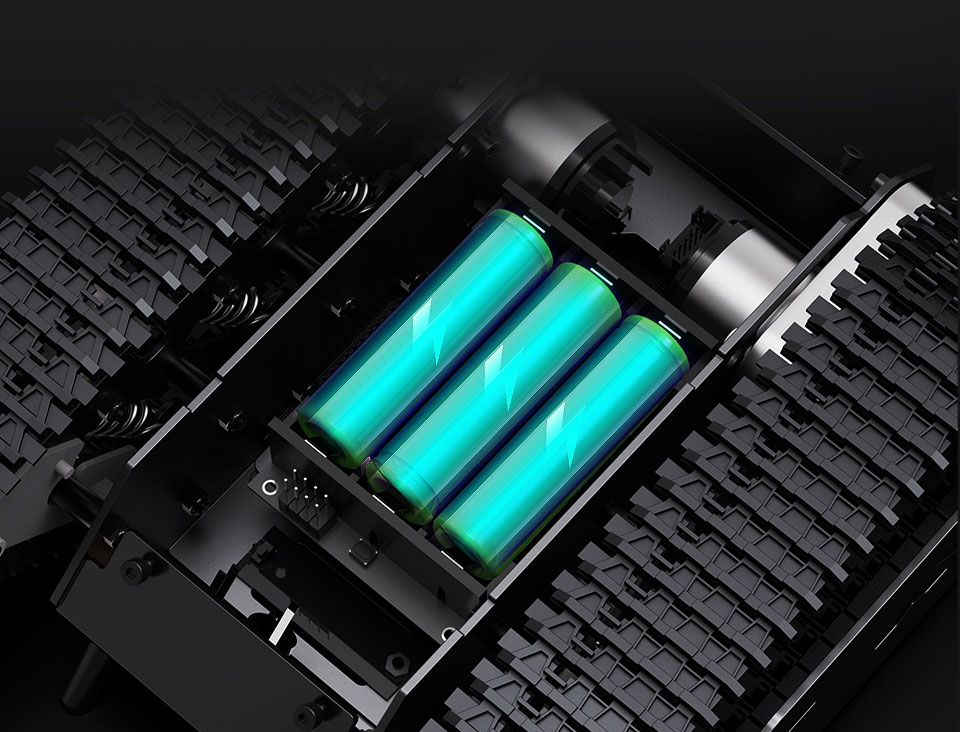
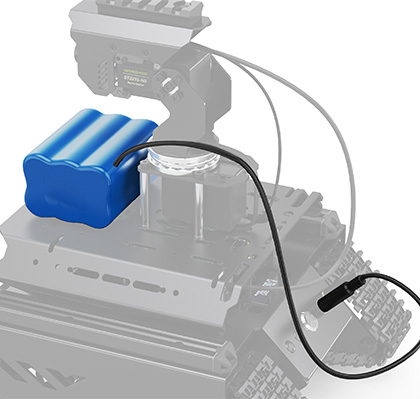
Suporte bateria lítio 18650
Módulo UPS De Alta Eficiência A Bordo, Suporta Carregamento E Descarga Ao Mesmo Tempo Para Garantir Tempo De Espera Contínuo
* As baterias 18650 NÃO estão incluídas
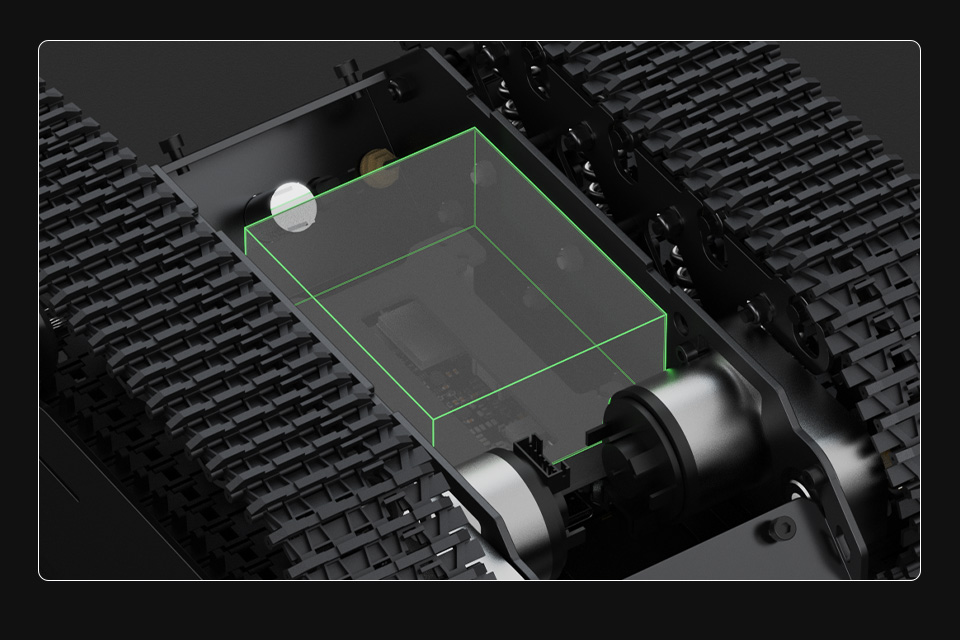
Grande espaço interno para a extensão
Suporta instalar bateria de lítio maior com interface XH2.54 para substituir o módulo UPS
Por favor, consulte o desenho de código aberto para as dimensões detalhadas do espaço interno
Corpo De Alumínio De Alta Resistência
Motor de alta velocidade + controle de velocidade de circuito fechado PID de alta frequência
Suporta resposta rápida sem ocupar os recursos para o controlador host
Mais detalhes do projeto
Cria automaticamente um hotspot para acessar quando não há conexão de rede disponível após a conexão
Construído em refrigeração ativa de alta eficiência para operação de longa data do controlador host, mesmo ao compilar pacotes ROS2 complexos
Display OLED para exibir informações em tempo real
Suporta expandir conjunto bateria externa via porta DC5521
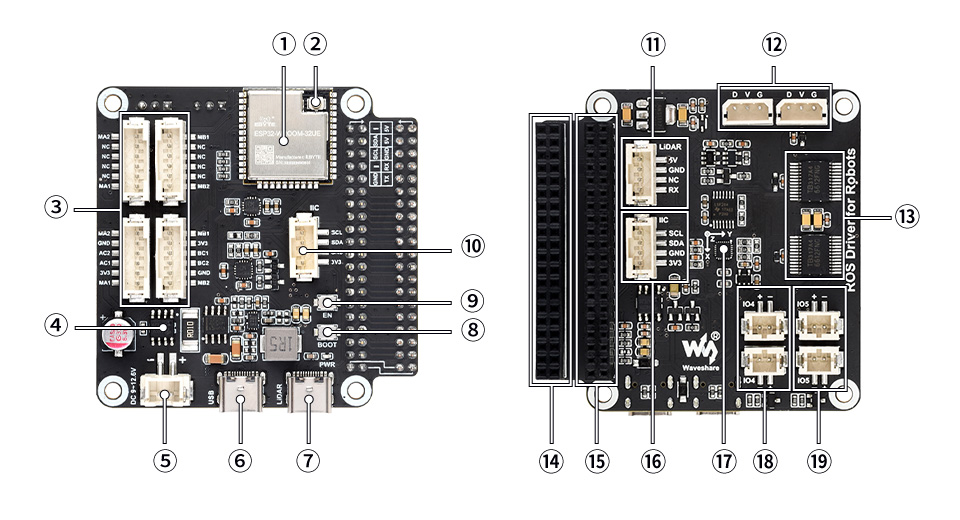
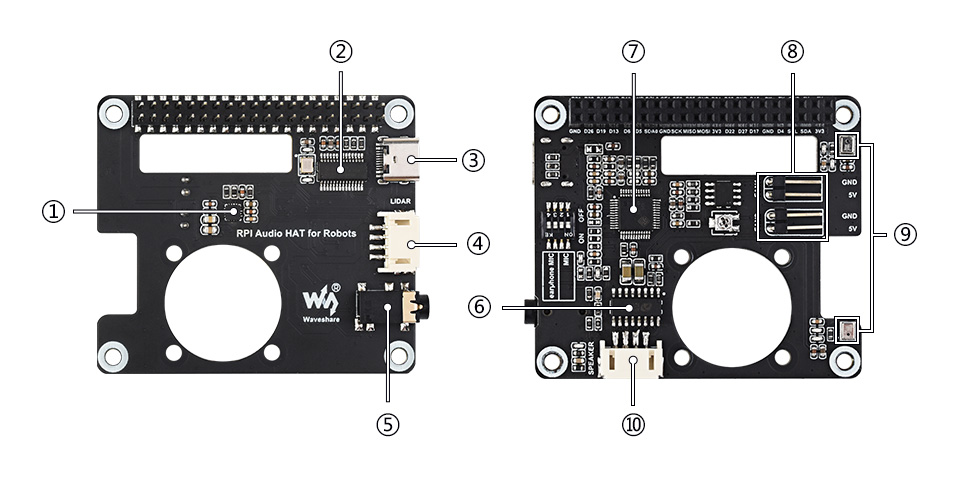
Multi-Funcional Driver Board
Usado como sub-controlador do robô, módulo ESP32 a bordo e pode ser controlado via porta serial, solicitação http, ESP-NOW e outros protocolos de comunicação, fornece uma aplicação web para algum controle básico do robô.
ESP32 pode segurar cálculos de baixo nível para o robô, tais como o controlador de alta frequência do PID para controlar a velocidade da roda, cálculos cinemáticos inversos de alta frequência para enlaces robóticos do braço, cálculo da interpolação da posição, pan-Tilt ângulo controle e tela OLED controle, etc.
O ESP32 também é responsável pela leitura de dados de vários sensores, como IMU (sensor de atitude de 9 eixos) e INA219 (detecção de tensão da bateria), e pode atingir independentemente a função de estabilização vertical da câmera, economizando recursos de computação e IO para o controlador host.
Módulo ESP32
Conector antena módulo ESP32
Interfaces do controlo do motor
INA219
Bateria tensão detecção IC
Fonte de energia
Comunicação/download USB
Conector USB Lidar
Botão ESP32-IO0
Botão ESP32-EN
Interface do dispositivo I2C
Interface UART Lidar
Interfaces do servo controle do barramento
TB6612FNG
Motorista do motor IC
Controlador host cabeçalho estendido 40PIN
Host controlador conexão cabeçalho
Interface do dispositivo I2C
CIM20948
Sensor de atitude IMU de 9 eixos
Interruptor 12V controlado por ESP32-IO4
Interruptor 12V controlado por ESP32-IO5
Conselho Driver Áudio
Placa de driver de áudio projetada para controlador host robot, interface USB integrada, adequada para Raspberry Pi 4B / Raspberry Pi 5 e outras placas-mãe, compatível com vários sistemas.
Adota SSS1629A5 áudio control chip, fornece funções de entrada e saída de áudio confiáveis, suporta comunicação interface USB, driver-free, plug and play. Onboard APA2068 chip amplificador de áudio, fornece amplificação de áudio de alta qualidade para garantir saída clara e estável sinal de áudio.
Integrado FE1.1S USB 2.0 HUB e CH340 chips para enviar dados de periféricos seriais, como Lidar para o controlador host via cabo USB sem ocupar muitos recursos do host.
Lidar UART para USB IC
HUB IC USB
Porta tipo C
Interface UART Lidar
3,5 milímetros AUX áudio jack
APA2068KAI-TRG
Amplificador áudio IC
SSS1629A5
Controle audio IC
Cooling fã alimentação cabeçalho fornecimento
Microfone de pista dupla
Cabeçalho do altifalante de pista dupla




































Avaliações
Ainda não existem avaliações.