


O UGV Rover é um robô AI projetado para exploração e criação, com excelente potencial de expansão, conectando perfeitamente sua imaginação com a realidade.Adequado para entusiastas de tecnologia, criadores ou iniciantes em programação, é a escolha ideal para explorar o mundo da tecnologia inteligente.
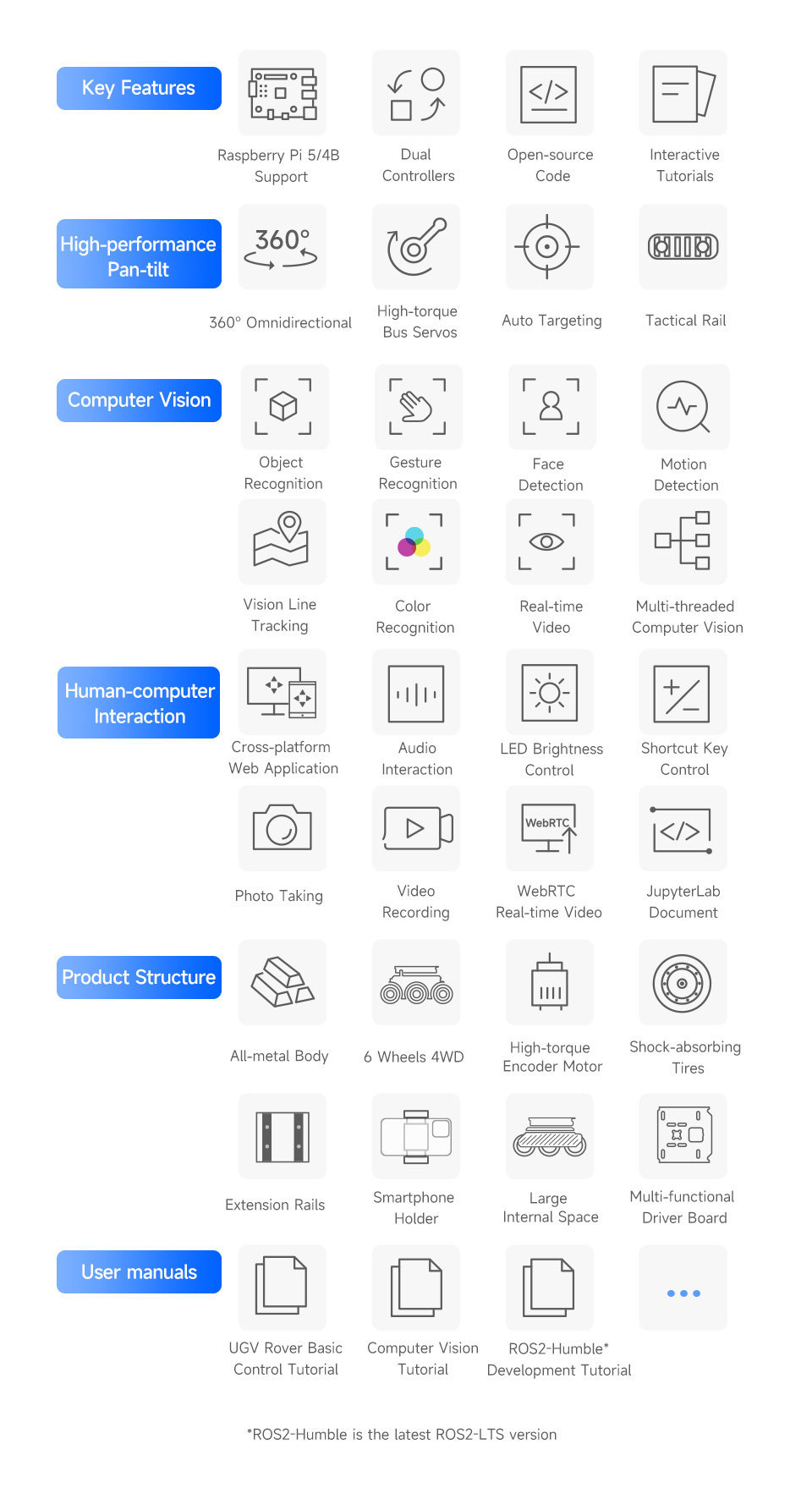
Equipado com o computador Raspberry Pi de alto desempenho para enfrentar os desafios de estratégias e funções complexas e inspirar sua criatividade.Adota design de controlador duplo, combina as funções de IA de alto nível do controlador host com as operações básicas de alta frequência do subcontrolador, tornando cada operação precisa e suave.
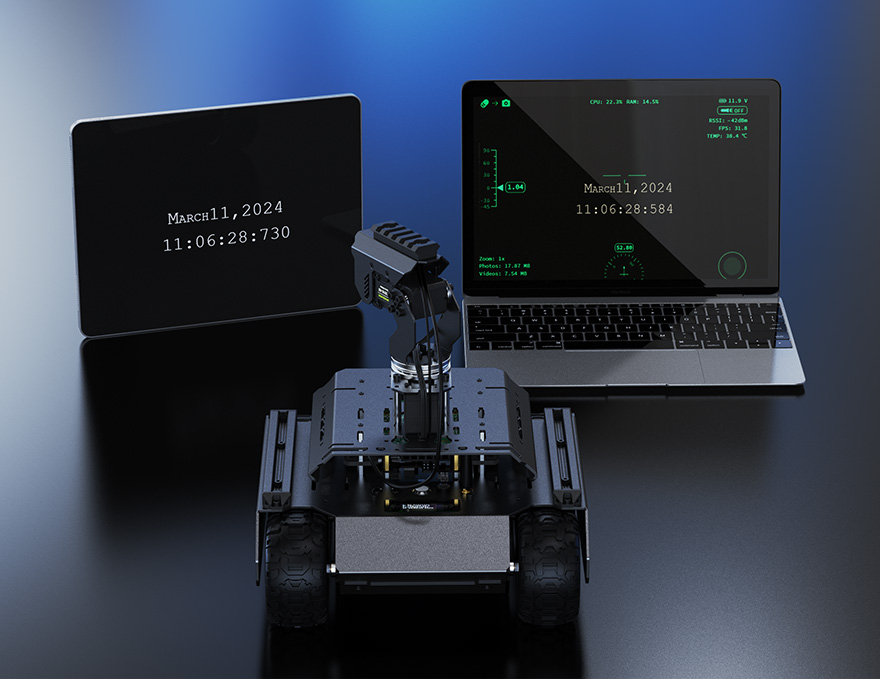
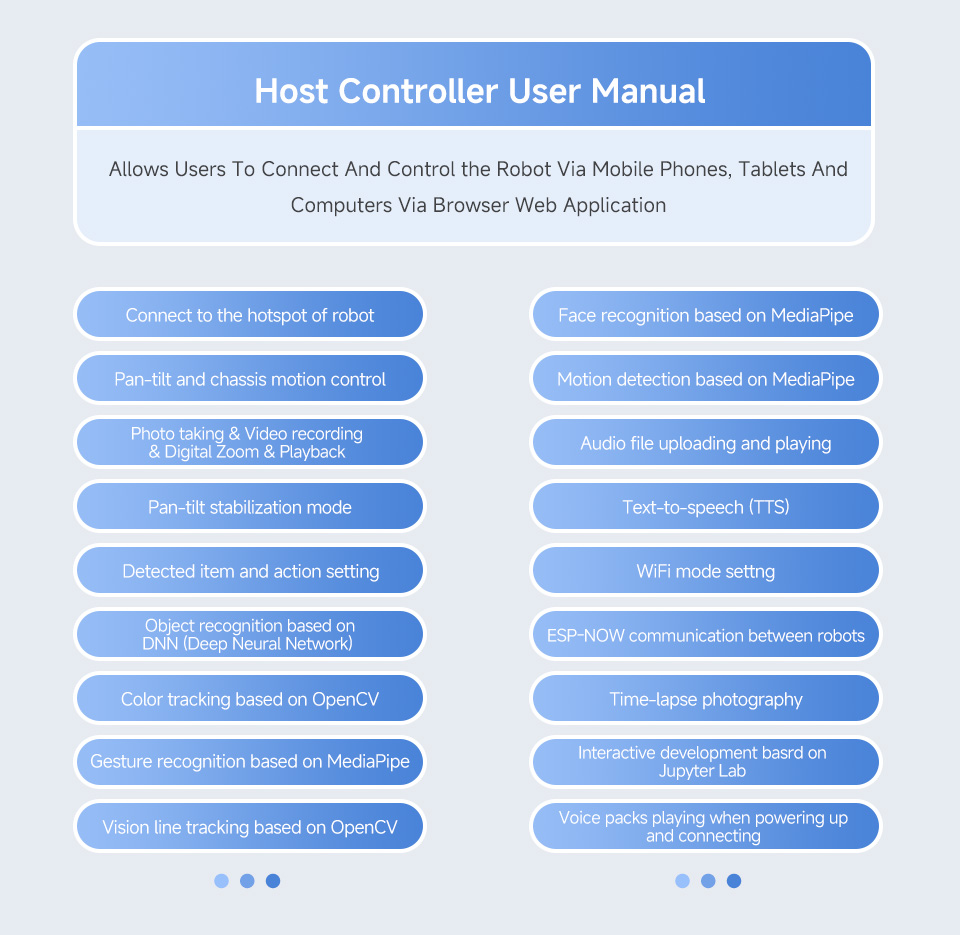
Fácil de ser controlado remotamente via UGV Rover Web Application sem baixar nenhum software, basta abrir seu navegador e iniciar sua jornada.Suporta transmissão de vídeo em tempo real com alta taxa de quadros e múltiplas funções AI Computer Vision, o UGV Rover é uma plataforma ideal para concretizar suas ideias e criatividade!
Módulo Pan-Tilt opcional (somente versão PT) para melhor potencial de expansão.Opções para controlador host (Raspberry Pi 4B / Raspberry Pi 5), ou você pode escolher a versão Acce se tiver um Pi.Todos os kits estão equipados com câmera, acessórios de montagem, cartão TF, ventilador de resfriamento, etc.
MODELO |
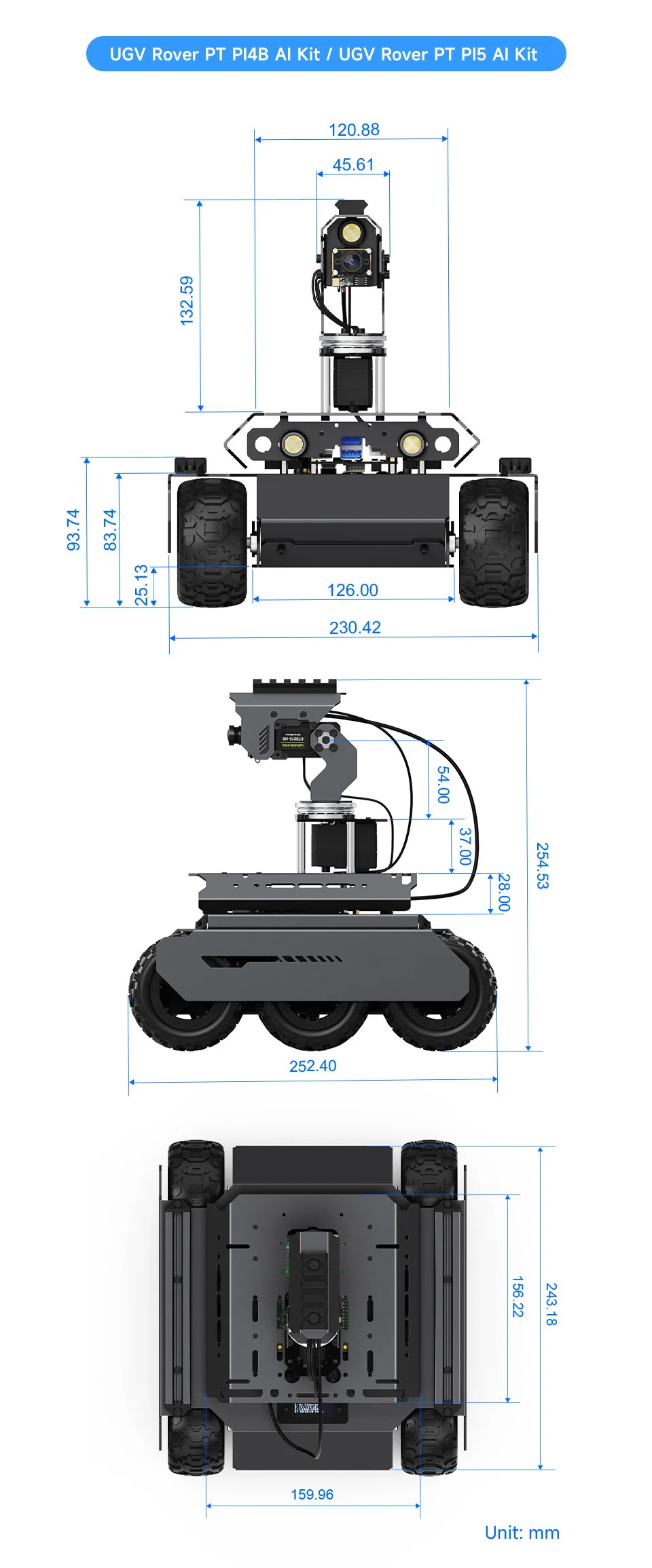
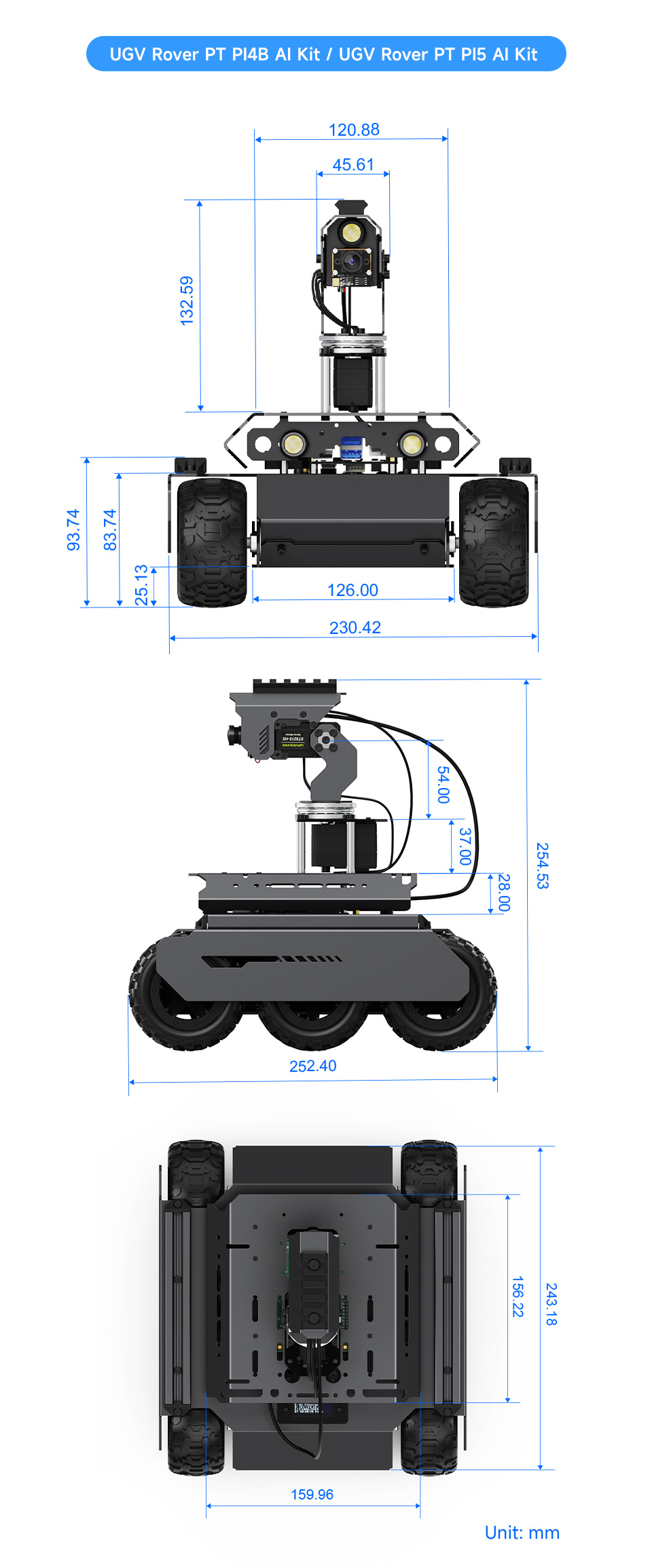
Kit UGV Rover PT PI4B/PI5 AI |
Aceitar kit UGV Rover PT PI4B/PI5 AI |
Kit UGV Rover PI4B/PI5 AI |
Aceitar kit UGV Rover PI4B/PI5 AI |
|
|
|
|
|
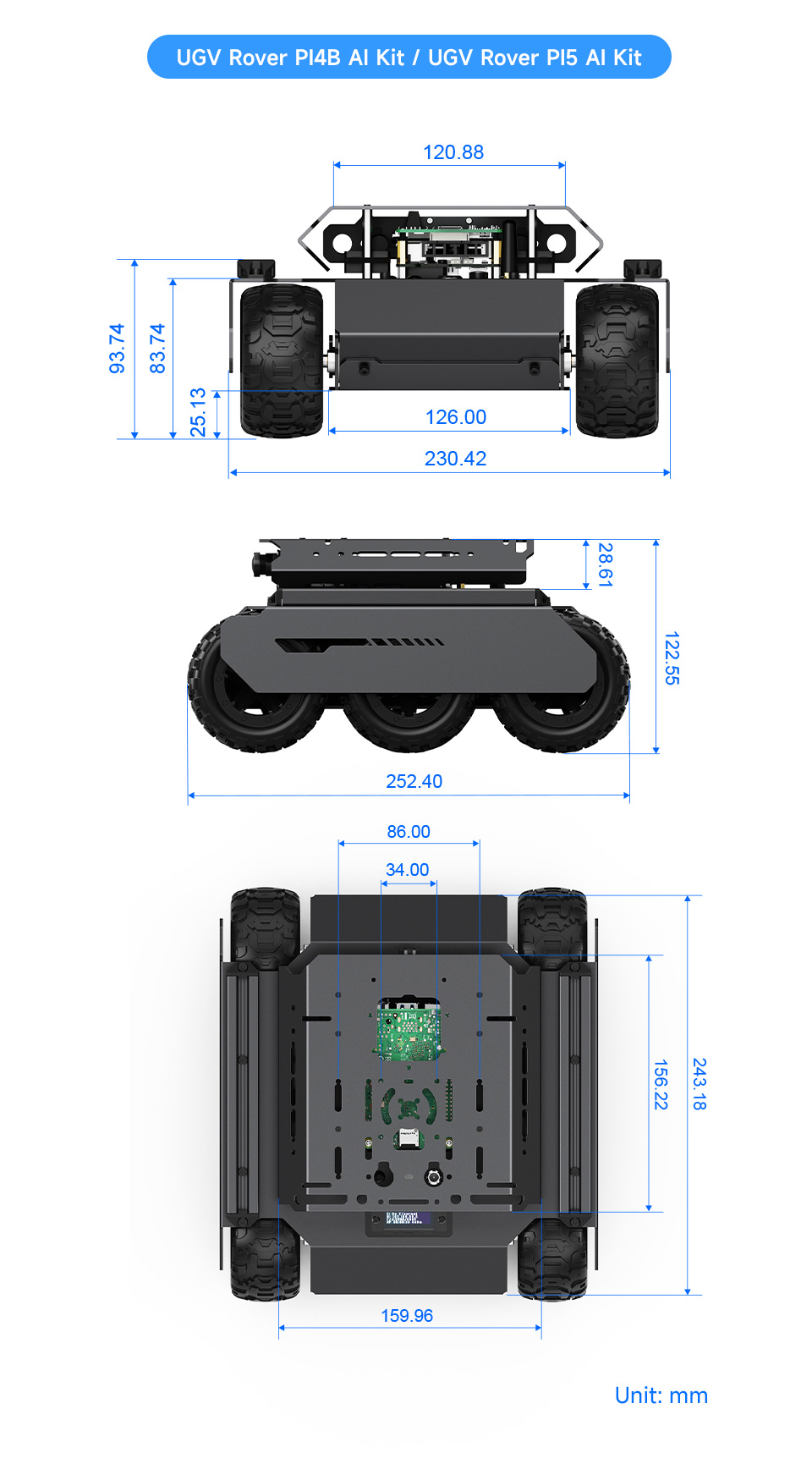
DIMENSÃO |
230,42×252,40×254.53mm |
230,42×252,40×122,55mm |
||
PESO |
2190±5g |
1874±5g |
||
ALTURA DO CHASSIS |
25 mm |
|||
PAN-TILT DOF |
2 |
- |
||
TORQUE DE SERVO PAN-TILT |
30KG.CM |
- |
||
SERVO PAN-TILT |
Servo ST3215 |
- |
||
CONTROLADOR DE HOST |
RPi 4B 4GB / RPi 5 4GB |
NÃO incluído |
RPi 4B 4GB / RPi 5 4GB |
NÃO incluído |
SUPORTE DE SISTEMA DE HOST |
Livro de Debian |
|||
VERSÃO ROS2 |
ROS2-HUMBLE-LTS |
|||
FOV DE CÂMERA |
160° |
|||
FONTE DE ENERGIA |
Módulo UPS 3S |
|||
SUPORTE DE BATERIA |
Bateria de lítio 18650 x 3 (NÃO incluída) |
|||
MÉTODOS DE CONTROLE DE DEMO |
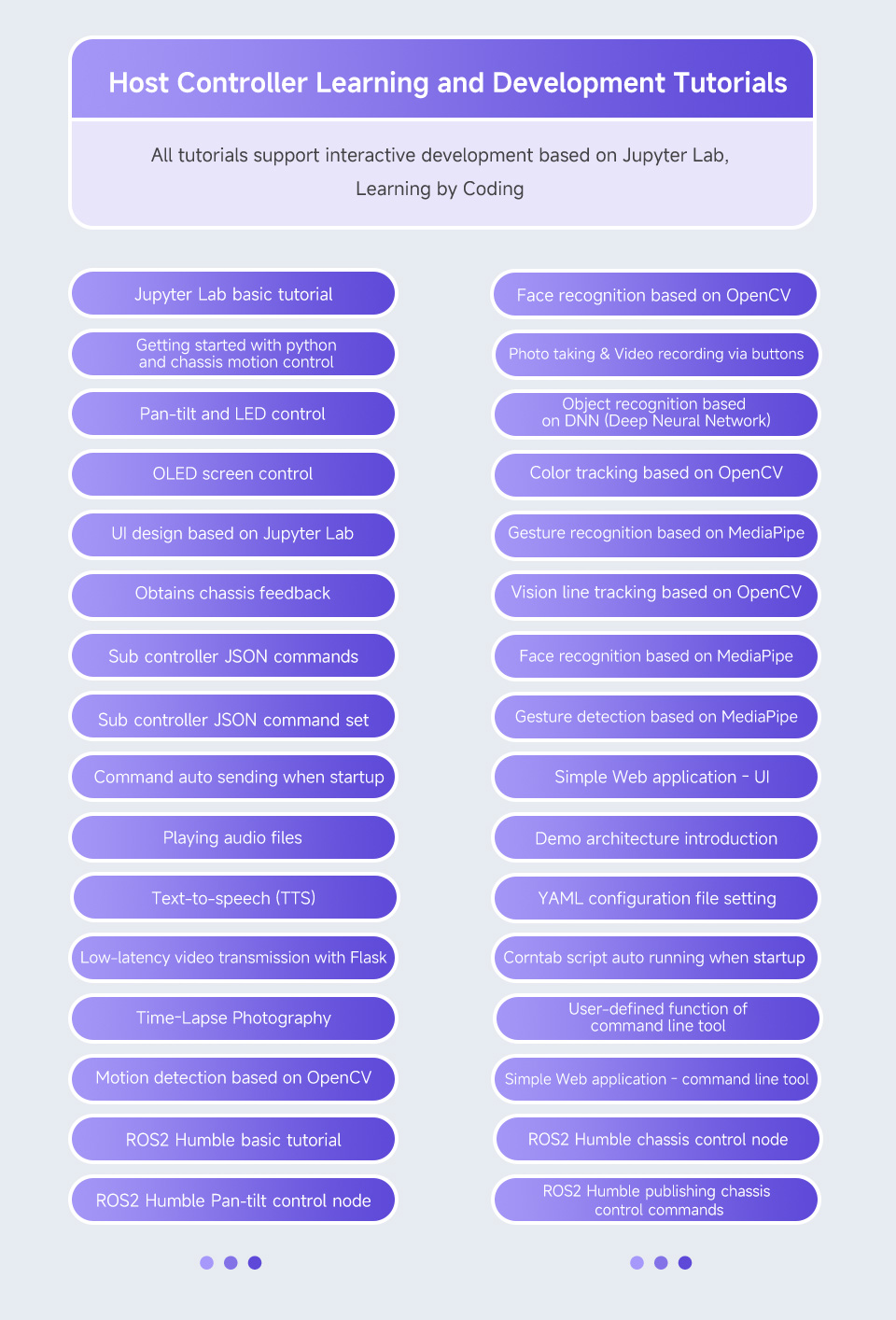
Aplicação web / programação interativa Jupyter Lab |
|||
VELOCIDADE MÁXIMA DEFAULTÃO |
1,3m/s |
|||
NÚMERO DE RODAS DE CONDUÇÃO |
4 |
|||
NÚMERO DE RODAS |
6 |
|||
DIÂMETRO DO PNEU |
80 mm |
|||
LARGURA DO PNEU |
42,5 mm |
|||
RADIUS DE GIRO MÍNIMO |
0M (rotação in-situ) |
|||




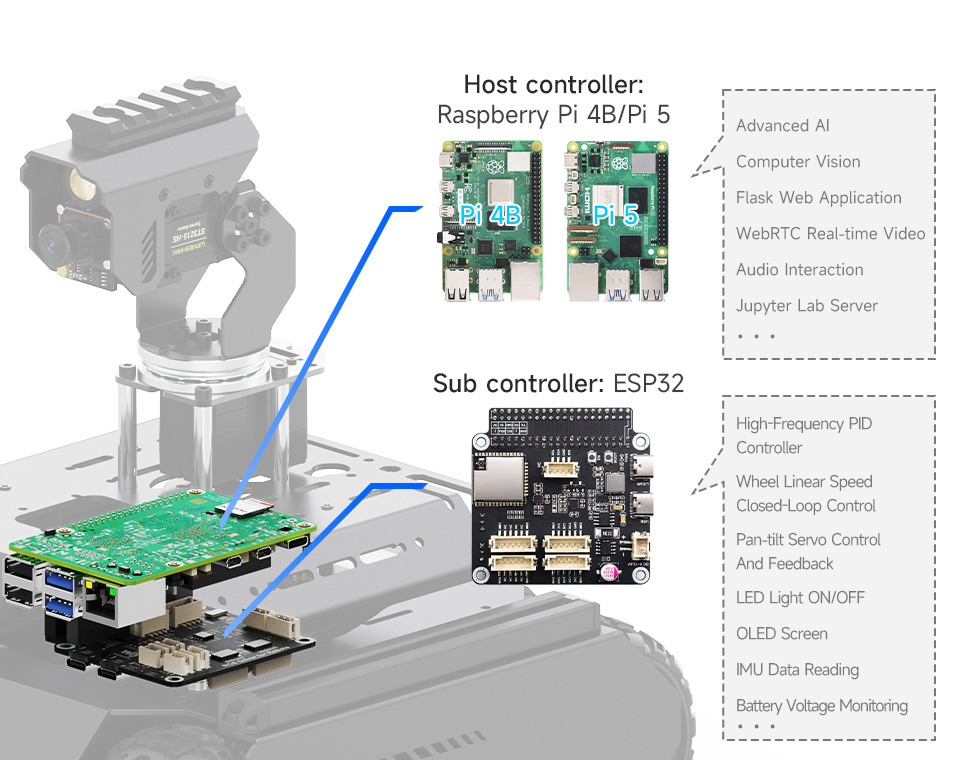
O controlador host adota Raspberry Pi para visão AI e planejamento de estratégia, e o subcontrolador usa ESP32 para controle de movimento e processamento de dados de sensores
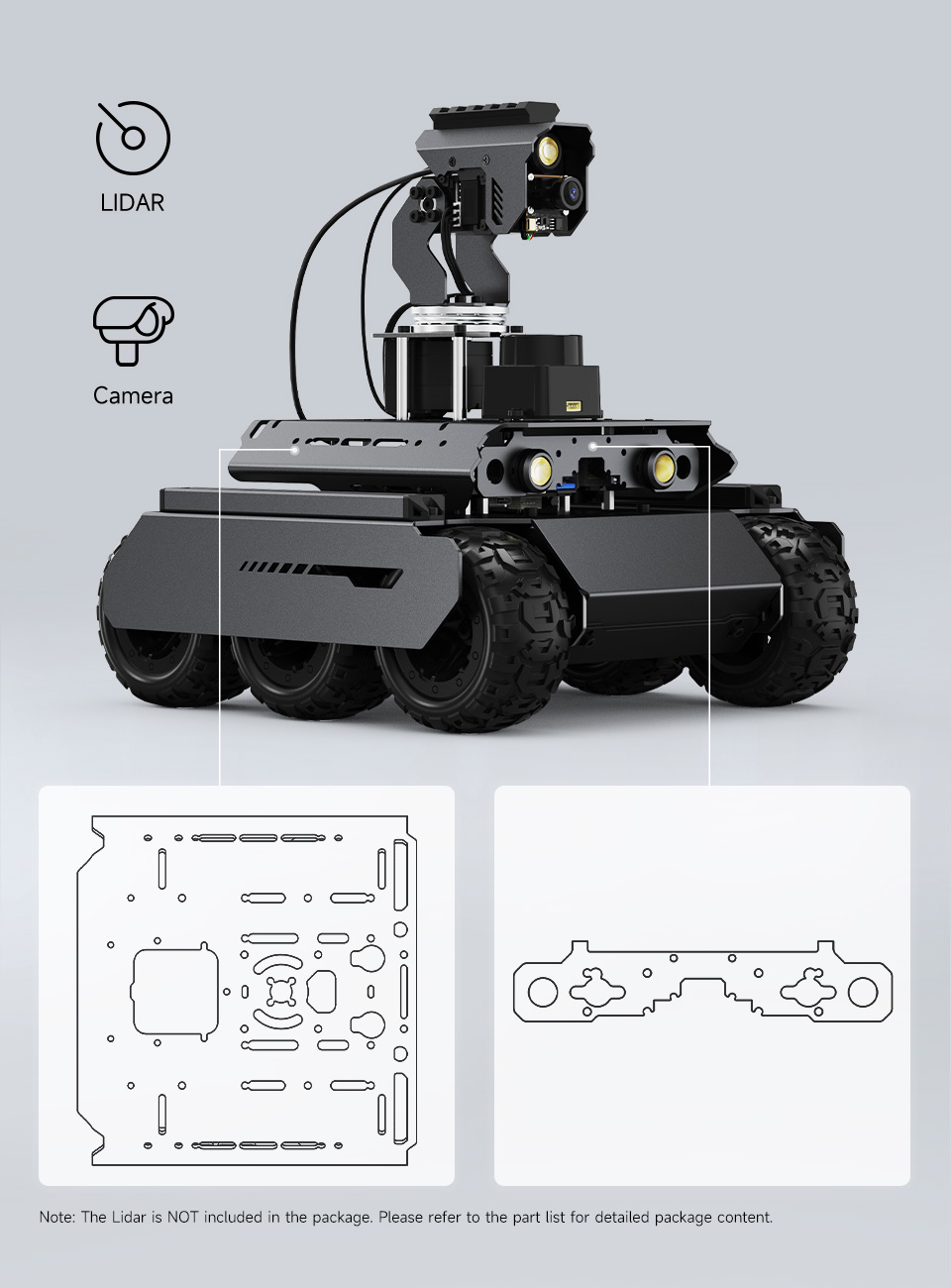
Placa de montagem
Pode ser usado para instalar uma variedade de periféricos, incluindo D500 Lidar, STL-27Lidar, câmera ou outros módulos.Fonte aberta para desenho DXF e modelo 3D, que é mais conveniente para desenvolvimento secundário.



Integrado com função de rastreamento de linha de visão na demonstração de visão do computador, vem com fita amarela para facilitar a planejamento de um caminho para o robô.Os usuários podem compreender os algoritmos básicos da direção autônoma com esta demonstração simples

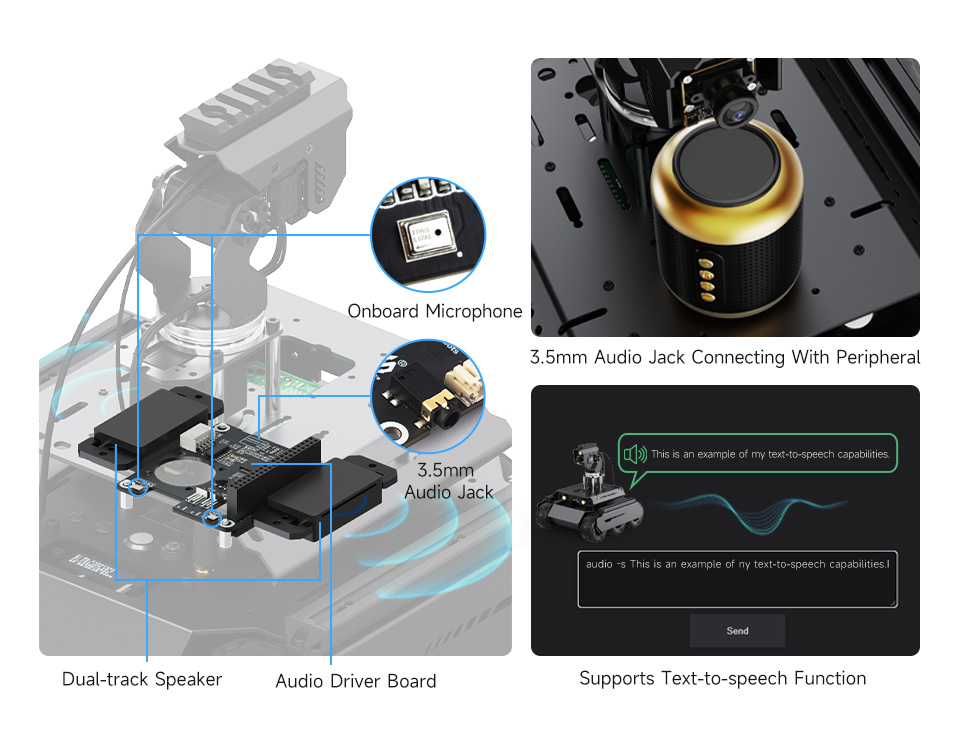
Equipado com placa de driver de áudio, alto-falante de trilha dupla e microfone integrado, entrada de áudio de 3,5 mm integrada para conectar periféricos para obter reprodução de texto para fala e áudio

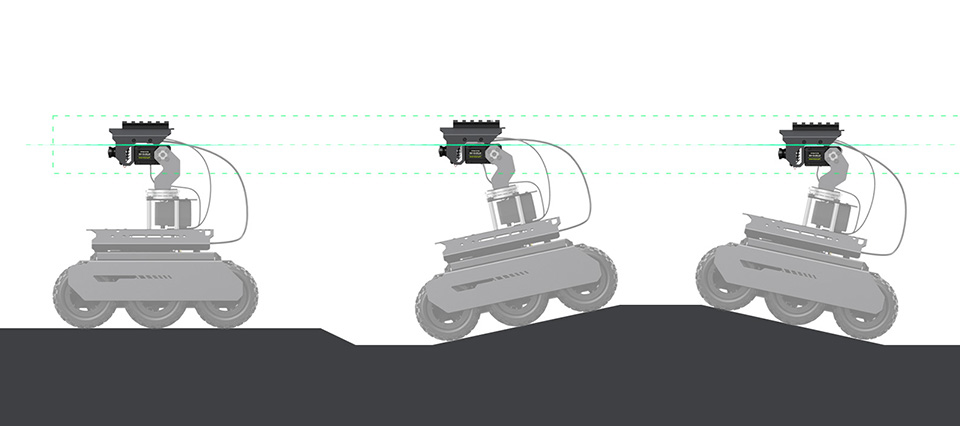
Suporta função de estabilização de câmera baseada no sensor IMU para manter a imagem estável.Realiza leitura, cálculo e controle de inclinação de dados IMU por meio de subcontrolador, que não ocupará recursos de computação do host




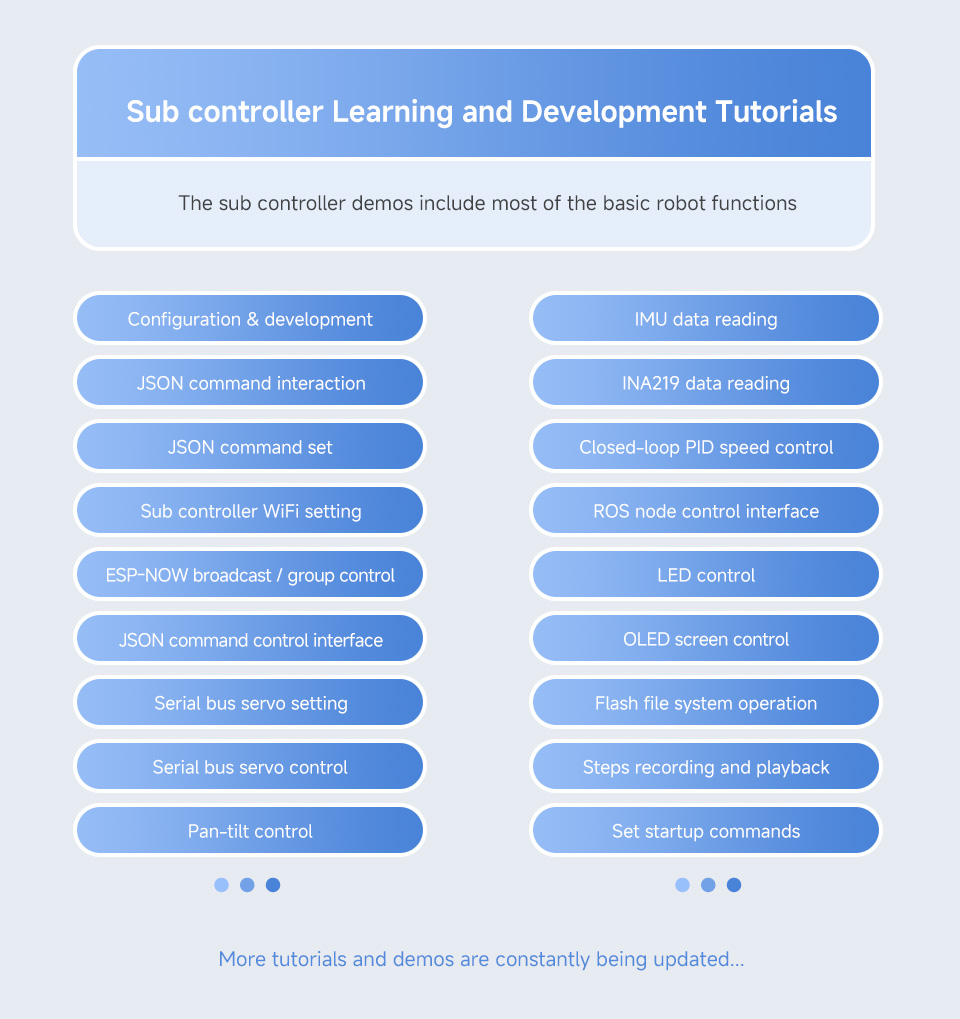
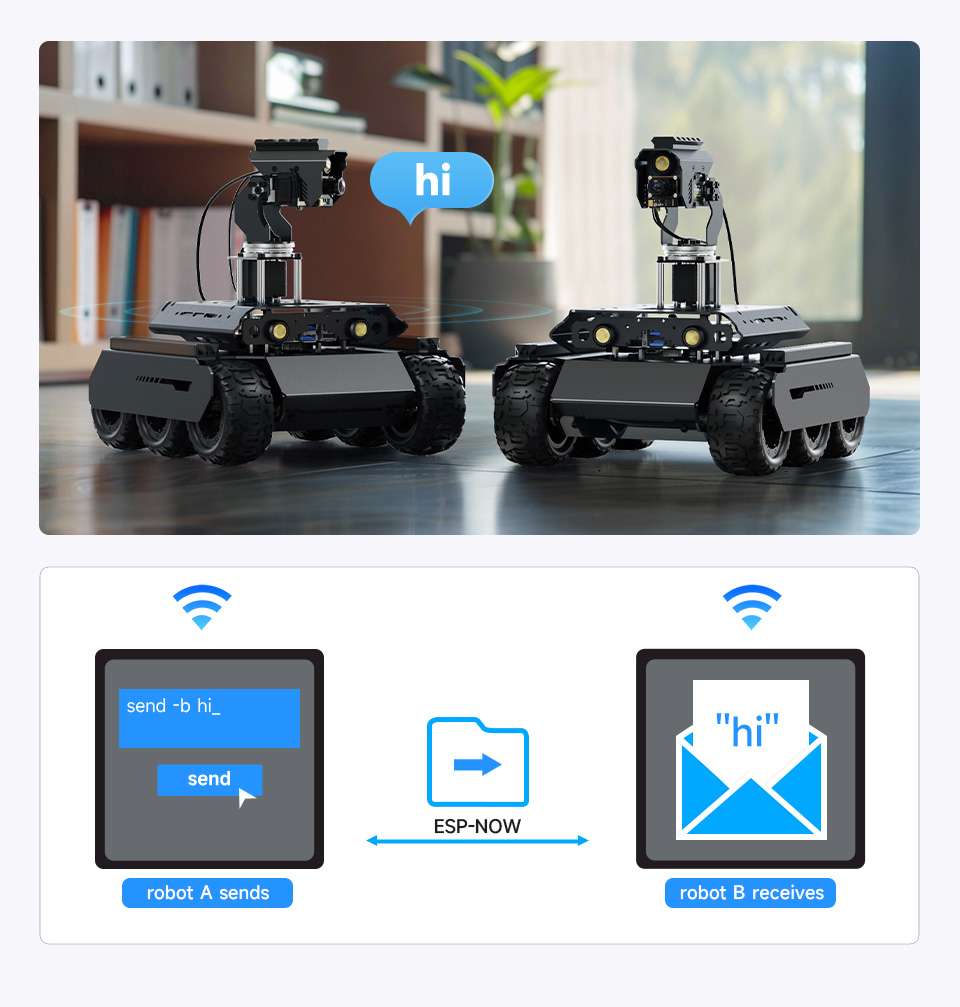
Usado como subcontrolador do robô, módulo ESP32 integrado e pode ser controlado via porta serial, solicitação http, ESP-NOW e outros protocolos de comunicação, fornece uma aplicação web para algum controle básico do robô.
ESP32 pode lidar com computações de baixo nível para o robô, como controlador PID de alta frequência para controlar a velocidade da roda, cálculos de cinemática reversa de alta frequência para ligações de braço robótico, cálculo de interpolação de posição, controle de ângulo Pan-Tilt e controle de tela OLED, etc.
ESP32 também é responsável pela leitura de dados de vários sensores, como IMU (sensor de atitude de 9 eixos) e INA219 (detecção de tensão da bateria), e pode alcançar de forma independente a função de estabilização vertical da câmera, economizando efetivamente recursos computacionais e IO para o controlador host.
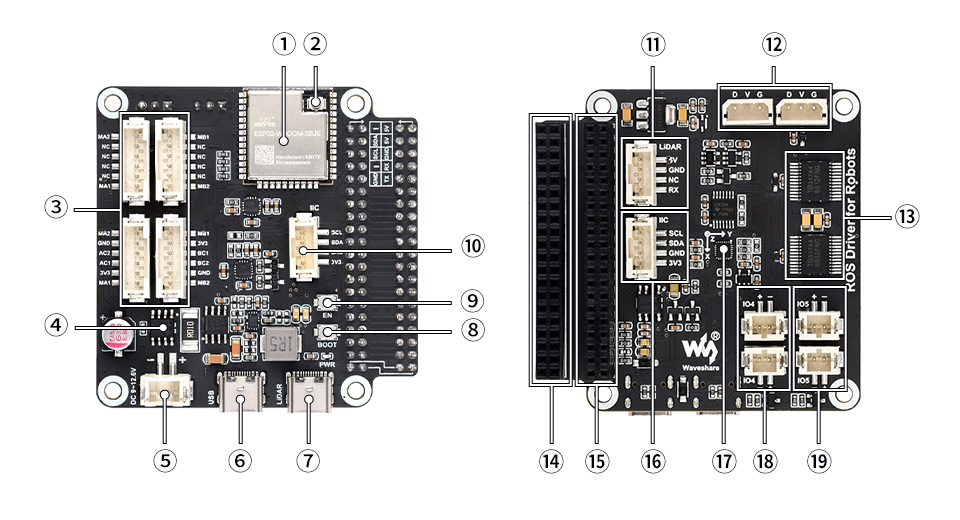
Módulo ESP32
Conector de antena do módulo ESP32
Interfaces de controle do motor
INA219
IC de detecção de tensão da bateriaFonte de alimentação
Comunicação/download USB
Conector USB Lidar
Botão ESP32-IO0
Botão ESP32-EN
Interface do dispositivo I2C
Interface UART Lidar
Interfaces de controle servo de ônibus
TB6612FNG
IC do driver do motorConector estendido do controlador host 40PIN
Cabeçalho de conexão do controlador host
Interface do dispositivo I2C
ICM20948
Sensor de atitude IMU de 9 eixosInterruptor de 12V controlado por ESP32-IO4
Interruptor de 12V controlado pelo ESP32-IO5
A placa de driver de áudio foi projetada para controlador de host de robô, interface USB integrada, adequada para Raspberry Pi 4B / Raspberry Pi 5 e outras placas-mãe, compatível com vários sistemas.
Adota o chip de controle de áudio SSS1629A5, fornece funções confiáveis de entrada e saída de áudio, suporta comunicação de interface USB, sem driver, plug and play.Chip amplificador de áudio APA2068 integrado, fornece amplificação de áudio de alta qualidade para garantir uma saída de sinal de áudio clara e estável.
HUB USB 2.0 FE1.1S integrado e chips CH340 para envio de dados de periféricos seriais como Lidar para o controlador host via cabo USB sem ocupar muitos recursos do host.
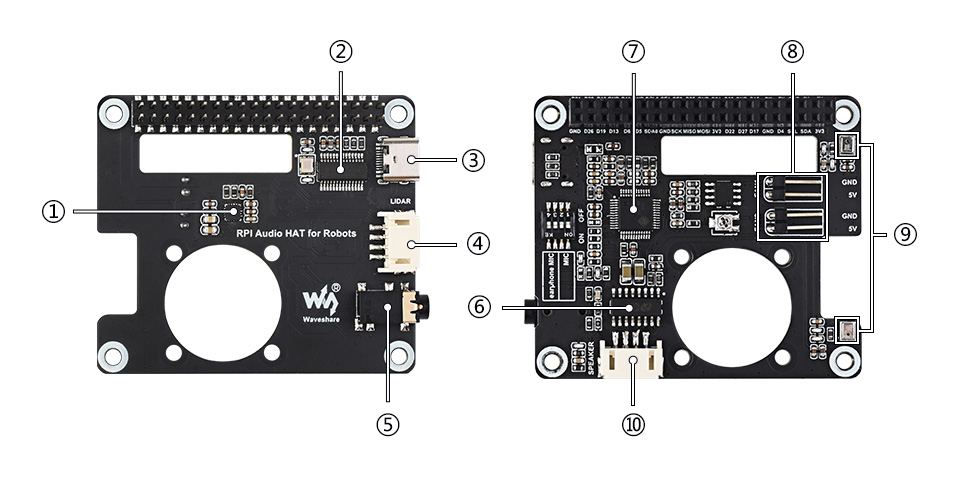
Lidar UART para USB IC
IC de HUB USB
Porta tipo C
Interface UART Lidar
Conector de áudio AUX de 3,5 mm
APA2068KAI-TRG
Amplificador de áudio IC
SSS1629A5
IC de controle de áudioCabeçalho da fonte de alimentação do ventilador de refrigeração
Microfone de pista dupla
Conector de alto-falante de trilha dupla
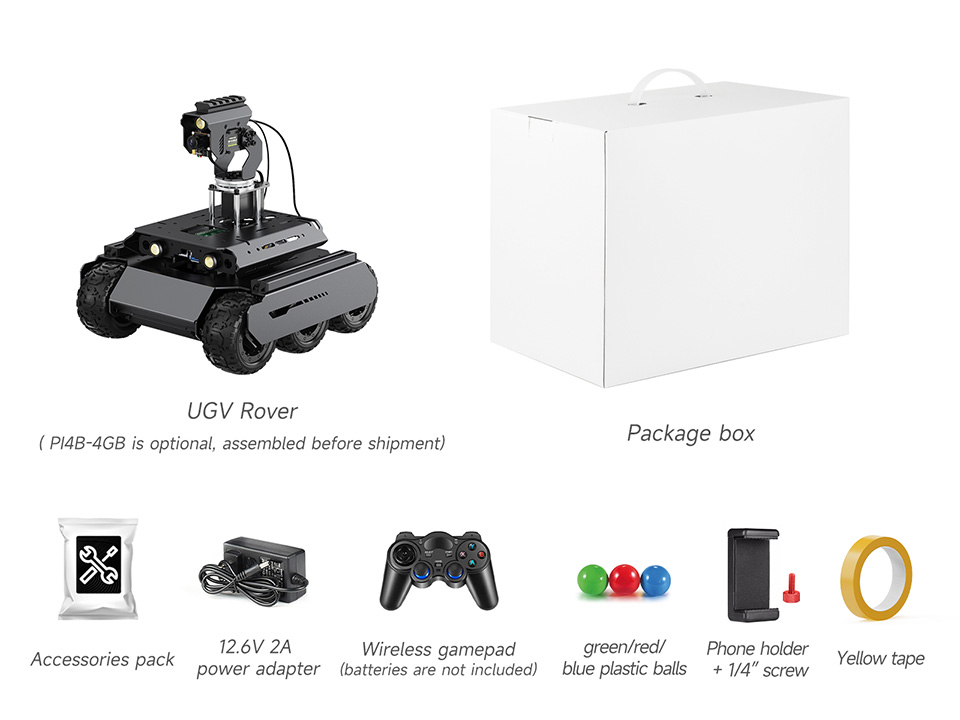
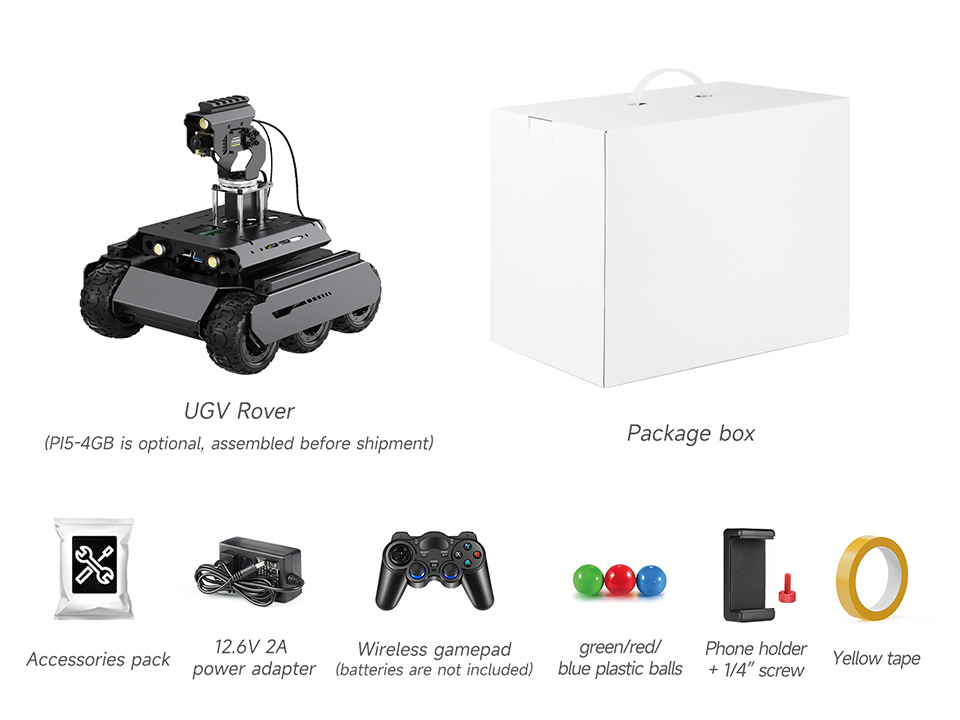
 Conteúdo do pacote
Conteúdo do pacote
Peso: 6,15 kg
Kit AI UGV Rover PT PI4B
Kit UGV Rover PT PI5 AI





Avaliações
Ainda não existem avaliações.